Ruoyu Sun , Chuang Liu , Jing Zhao , Qiangqiang Sun , Jiliang Mo , Zhongrong Zhou
{"title":"Solar water evaporation-induced long-term locomotion of self-propelled soft robots","authors":"Ruoyu Sun , Chuang Liu , Jing Zhao , Qiangqiang Sun , Jiliang Mo , Zhongrong Zhou","doi":"10.1016/j.nanoen.2024.109938","DOIUrl":null,"url":null,"abstract":"<div><p>Self-propelled soft robots have attracted extensive attention because of their unique application in exploring dangerous and complex environments that are unsuitable for human beings. However, these soft robots require cyclical chemical stimulation or external power and have short locomotion times, which limits their practical applications. It remains challenging to create self-propelled soft robots exhibiting long-term locomotion. Here, we couple an active hydrogel with a solar absorbing coating to realize self-propelled soft robots with long-term locomotion. The active hydrogel can move freely on the water surface by continuously establishing asymmetric surface tension through dynamic wetting. The sunlight absorbers promote water evaporation inside the self-propelled soft robot to delay or even disrupt the swelling equilibrium of the hydrogel, thus establishing dynamic balance between water absorption and evaporation. In this way, the locomotion time of this self-propelled soft robot under constant light irradiation equivalent to 1 sun (1 kW/m<sup>2</sup>) is 6.5 times higher than that of active hydrogel reported previously. Owing to the enhanced locomotion time through solar water evaporation water, this self-propelled soft robot is expected to be applied to oil pollution exploration, cargo transportation, and debris cleaning in small water areas.</p></div>","PeriodicalId":394,"journal":{"name":"Nano Energy","volume":"128 ","pages":"Article 109938"},"PeriodicalIF":17.1000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nano Energy","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2211285524006876","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/6/27 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
引用次数: 0
Abstract
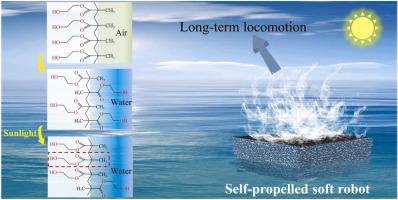
Self-propelled soft robots have attracted extensive attention because of their unique application in exploring dangerous and complex environments that are unsuitable for human beings. However, these soft robots require cyclical chemical stimulation or external power and have short locomotion times, which limits their practical applications. It remains challenging to create self-propelled soft robots exhibiting long-term locomotion. Here, we couple an active hydrogel with a solar absorbing coating to realize self-propelled soft robots with long-term locomotion. The active hydrogel can move freely on the water surface by continuously establishing asymmetric surface tension through dynamic wetting. The sunlight absorbers promote water evaporation inside the self-propelled soft robot to delay or even disrupt the swelling equilibrium of the hydrogel, thus establishing dynamic balance between water absorption and evaporation. In this way, the locomotion time of this self-propelled soft robot under constant light irradiation equivalent to 1 sun (1 kW/m2) is 6.5 times higher than that of active hydrogel reported previously. Owing to the enhanced locomotion time through solar water evaporation water, this self-propelled soft robot is expected to be applied to oil pollution exploration, cargo transportation, and debris cleaning in small water areas.
期刊介绍:
Nano Energy is a multidisciplinary, rapid-publication forum of original peer-reviewed contributions on the science and engineering of nanomaterials and nanodevices used in all forms of energy harvesting, conversion, storage, utilization and policy. Through its mixture of articles, reviews, communications, research news, and information on key developments, Nano Energy provides a comprehensive coverage of this exciting and dynamic field which joins nanoscience and nanotechnology with energy science. The journal is relevant to all those who are interested in nanomaterials solutions to the energy problem.
Nano Energy publishes original experimental and theoretical research on all aspects of energy-related research which utilizes nanomaterials and nanotechnology. Manuscripts of four types are considered: review articles which inform readers of the latest research and advances in energy science; rapid communications which feature exciting research breakthroughs in the field; full-length articles which report comprehensive research developments; and news and opinions which comment on topical issues or express views on the developments in related fields.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
