Yaguang Yan , Minan Tang , Wenjuan Wang , Yaqi Zhang , Bo An
{"title":"Trajectory tracking control of wearable upper limb rehabilitation robot based on Laguerre model predictive control","authors":"Yaguang Yan , Minan Tang , Wenjuan Wang , Yaqi Zhang , Bo An","doi":"10.1016/j.robot.2024.104745","DOIUrl":null,"url":null,"abstract":"<div><p>Wearable rehabilitation robots have become an important auxiliary tool in rehabilitation therapy, providing effective rehabilitation training and helping to recover damaged muscles and joints. In response to the difficulty of traditional control methods in solving various constraints in the trajectory tracking process of the Upper Limb Rehabilitation Robot (ULRR), this study uses model predictive control to study the trajectory tracking problem of the upper limb rehabilitation robot. Firstly, based on the Lagrangian dynamic model of wearable rehabilitation robots, an extended state space model with pseudo linearization of the system was established. Given the performance indicators and various constraints of the system, a corresponding model predictive controller is designed based on the Laguerre model to ensure system performance while greatly reducing the computational complexity of predictive control. Secondly, the stability of the model predictive controller is demonstrated, and a disturbance observer is introduced into the controller to achieve compensation for slow-varying perturbations; a joint space sliding mode variable is also introduced to achieve simultaneous tracking of the joint’s desired position and desired velocity. Finally, taking a planar two bar robot as an example, comparative simulation verification was conducted on unconstrained joint trajectory tracking and constrained joint trajectory tracking. The simulation results show that the model predictive controller can achieve simultaneous tracking of joint expected trajectory and expected speed while meeting various constraints. It has good effects in improving patient motion control ability and reducing patient fatigue, providing new research ideas and methods for the field of rehabilitation therapy.</p></div>","PeriodicalId":49592,"journal":{"name":"Robotics and Autonomous Systems","volume":"179 ","pages":"Article 104745"},"PeriodicalIF":5.2000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Autonomous Systems","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0921889024001295","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/6/28 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
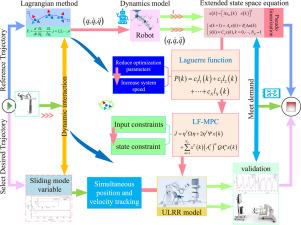
Wearable rehabilitation robots have become an important auxiliary tool in rehabilitation therapy, providing effective rehabilitation training and helping to recover damaged muscles and joints. In response to the difficulty of traditional control methods in solving various constraints in the trajectory tracking process of the Upper Limb Rehabilitation Robot (ULRR), this study uses model predictive control to study the trajectory tracking problem of the upper limb rehabilitation robot. Firstly, based on the Lagrangian dynamic model of wearable rehabilitation robots, an extended state space model with pseudo linearization of the system was established. Given the performance indicators and various constraints of the system, a corresponding model predictive controller is designed based on the Laguerre model to ensure system performance while greatly reducing the computational complexity of predictive control. Secondly, the stability of the model predictive controller is demonstrated, and a disturbance observer is introduced into the controller to achieve compensation for slow-varying perturbations; a joint space sliding mode variable is also introduced to achieve simultaneous tracking of the joint’s desired position and desired velocity. Finally, taking a planar two bar robot as an example, comparative simulation verification was conducted on unconstrained joint trajectory tracking and constrained joint trajectory tracking. The simulation results show that the model predictive controller can achieve simultaneous tracking of joint expected trajectory and expected speed while meeting various constraints. It has good effects in improving patient motion control ability and reducing patient fatigue, providing new research ideas and methods for the field of rehabilitation therapy.
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
