Alberto M. Esmorís , Hannah Weiser , Lukas Winiwarter , Jose C. Cabaleiro , Bernhard Höfle
{"title":"Deep learning with simulated laser scanning data for 3D point cloud classification","authors":"Alberto M. Esmorís , Hannah Weiser , Lukas Winiwarter , Jose C. Cabaleiro , Bernhard Höfle","doi":"10.1016/j.isprsjprs.2024.06.018","DOIUrl":null,"url":null,"abstract":"<div><p>Laser scanning is an active remote sensing technique applied in many disciplines to acquire state-of-the-art spatial measurements. Semantic labeling is often necessary to extract information from the raw point cloud. Deep learning methods constitute a data-hungry solution for the semantic segmentation of point clouds. In this work, we investigate the use of simulated laser scanning for training deep learning models, which are applied to real data subsequently. We show that training a deep learning model purely on virtual laser scanning data can produce results comparable to models trained on real data when evaluated on real data. For leaf-wood segmentation of trees, using the KPConv model trained with virtual data achieves 93.7% overall accuracy, while the model trained on real data reaches 94.7% overall accuracy. In urban contexts, a KPConv model trained on virtual data achieves 74.1% overall accuracy on real validation data, while the model trained on real data achieves 82.4%. Our models outperform the state-of-the-art model FSCT in terms of generalization to unseen real data as well as a baseline model trained on points randomly sampled from the tree mesh surface. From our results, we conclude that the combination of laser scanning simulation and deep learning is a cost-effective alternative to real data acquisition and manual labeling in the domain of geospatial point cloud analysis. The strengths of this approach are that (a) a large amount of diverse laser scanning training data can be generated quickly and without the need for expensive equipment, (b) the simulation configurations can be adapted so that the virtual training data have similar characteristics to the targeted real data, and (c) the whole workflow can be automated through procedural scene generation.</p></div>","PeriodicalId":50269,"journal":{"name":"ISPRS Journal of Photogrammetry and Remote Sensing","volume":"215 ","pages":"Pages 192-213"},"PeriodicalIF":12.2000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0924271624002569/pdfft?md5=85e93537aadaaaa88cbcdae2d9791d9d&pid=1-s2.0-S0924271624002569-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"ISPRS Journal of Photogrammetry and Remote Sensing","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0924271624002569","RegionNum":1,"RegionCategory":"地球科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/13 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"GEOGRAPHY, PHYSICAL","Score":null,"Total":0}
引用次数: 0
Abstract
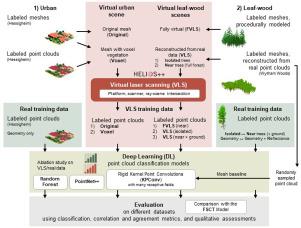
Laser scanning is an active remote sensing technique applied in many disciplines to acquire state-of-the-art spatial measurements. Semantic labeling is often necessary to extract information from the raw point cloud. Deep learning methods constitute a data-hungry solution for the semantic segmentation of point clouds. In this work, we investigate the use of simulated laser scanning for training deep learning models, which are applied to real data subsequently. We show that training a deep learning model purely on virtual laser scanning data can produce results comparable to models trained on real data when evaluated on real data. For leaf-wood segmentation of trees, using the KPConv model trained with virtual data achieves 93.7% overall accuracy, while the model trained on real data reaches 94.7% overall accuracy. In urban contexts, a KPConv model trained on virtual data achieves 74.1% overall accuracy on real validation data, while the model trained on real data achieves 82.4%. Our models outperform the state-of-the-art model FSCT in terms of generalization to unseen real data as well as a baseline model trained on points randomly sampled from the tree mesh surface. From our results, we conclude that the combination of laser scanning simulation and deep learning is a cost-effective alternative to real data acquisition and manual labeling in the domain of geospatial point cloud analysis. The strengths of this approach are that (a) a large amount of diverse laser scanning training data can be generated quickly and without the need for expensive equipment, (b) the simulation configurations can be adapted so that the virtual training data have similar characteristics to the targeted real data, and (c) the whole workflow can be automated through procedural scene generation.
期刊介绍:
The ISPRS Journal of Photogrammetry and Remote Sensing (P&RS) serves as the official journal of the International Society for Photogrammetry and Remote Sensing (ISPRS). It acts as a platform for scientists and professionals worldwide who are involved in various disciplines that utilize photogrammetry, remote sensing, spatial information systems, computer vision, and related fields. The journal aims to facilitate communication and dissemination of advancements in these disciplines, while also acting as a comprehensive source of reference and archive.
P&RS endeavors to publish high-quality, peer-reviewed research papers that are preferably original and have not been published before. These papers can cover scientific/research, technological development, or application/practical aspects. Additionally, the journal welcomes papers that are based on presentations from ISPRS meetings, as long as they are considered significant contributions to the aforementioned fields.
In particular, P&RS encourages the submission of papers that are of broad scientific interest, showcase innovative applications (especially in emerging fields), have an interdisciplinary focus, discuss topics that have received limited attention in P&RS or related journals, or explore new directions in scientific or professional realms. It is preferred that theoretical papers include practical applications, while papers focusing on systems and applications should include a theoretical background.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
