Yinghu Peng, Wei Wang, Lin Wang, Hao Zhou, Zhenxian Chen, Qida Zhang, Guanglin Li
{"title":"Smartphone videos-driven musculoskeletal multibody dynamics modelling workflow to estimate the lower limb joint contact forces and ground reaction forces.","authors":"Yinghu Peng, Wei Wang, Lin Wang, Hao Zhou, Zhenxian Chen, Qida Zhang, Guanglin Li","doi":"10.1007/s11517-024-03171-3","DOIUrl":null,"url":null,"abstract":"<p><p>The estimation of joint contact forces in musculoskeletal multibody dynamics models typically requires the use of expensive and time-consuming technologies, such as reflective marker-based motion capture (Mocap) system. In this study, we aim to propose a more accessible and cost-effective solution that utilizes the dual smartphone videos (SPV)-driven musculoskeletal multibody dynamics modeling workflow to estimate the lower limb mechanics. Twelve participants were recruited to collect marker trajectory data, force plate data, and motion videos during walking and running. The smartphone videos were initially analyzed using the OpenCap platform to identify key joint points and anatomical markers. The markers were used as inputs for the musculoskeletal multibody dynamics model to calculate the lower limb joint kinematics, joint contact forces, and ground reaction forces, which were then evaluated by the Mocap-based workflow. The root mean square error (RMSE), mean absolute deviation (MAD), and Pearson correlation coefficient (ρ) were adopted to evaluate the results. Excellent or strong Pearson correlations were observed in most lower limb joint angles (ρ = 0.74 ~ 0.94). The averaged MADs and RMSEs for the joint angles were 1.93 ~ 6.56° and 2.14 ~ 7.08°, respectively. Excellent or strong Pearson correlations were observed in most lower limb joint contact forces and ground reaction forces (ρ = 0.78 ~ 0.92). The averaged MADs and RMSEs for the joint lower limb joint contact forces were 0.18 ~ 1.07 bodyweight (BW) and 0.28 ~ 1.32 BW, respectively. Overall, the proposed smartphone video-driven musculoskeletal multibody dynamics simulation workflow demonstrated reliable accuracy in predicting lower limb mechanics and ground reaction forces, which has the potential to expedite gait dynamics analysis in a clinical setting.</p>","PeriodicalId":49840,"journal":{"name":"Medical & Biological Engineering & Computing","volume":" ","pages":"3841-3853"},"PeriodicalIF":2.6000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Medical & Biological Engineering & Computing","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s11517-024-03171-3","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/24 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
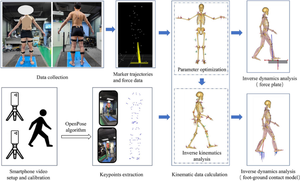
The estimation of joint contact forces in musculoskeletal multibody dynamics models typically requires the use of expensive and time-consuming technologies, such as reflective marker-based motion capture (Mocap) system. In this study, we aim to propose a more accessible and cost-effective solution that utilizes the dual smartphone videos (SPV)-driven musculoskeletal multibody dynamics modeling workflow to estimate the lower limb mechanics. Twelve participants were recruited to collect marker trajectory data, force plate data, and motion videos during walking and running. The smartphone videos were initially analyzed using the OpenCap platform to identify key joint points and anatomical markers. The markers were used as inputs for the musculoskeletal multibody dynamics model to calculate the lower limb joint kinematics, joint contact forces, and ground reaction forces, which were then evaluated by the Mocap-based workflow. The root mean square error (RMSE), mean absolute deviation (MAD), and Pearson correlation coefficient (ρ) were adopted to evaluate the results. Excellent or strong Pearson correlations were observed in most lower limb joint angles (ρ = 0.74 ~ 0.94). The averaged MADs and RMSEs for the joint angles were 1.93 ~ 6.56° and 2.14 ~ 7.08°, respectively. Excellent or strong Pearson correlations were observed in most lower limb joint contact forces and ground reaction forces (ρ = 0.78 ~ 0.92). The averaged MADs and RMSEs for the joint lower limb joint contact forces were 0.18 ~ 1.07 bodyweight (BW) and 0.28 ~ 1.32 BW, respectively. Overall, the proposed smartphone video-driven musculoskeletal multibody dynamics simulation workflow demonstrated reliable accuracy in predicting lower limb mechanics and ground reaction forces, which has the potential to expedite gait dynamics analysis in a clinical setting.
期刊介绍:
Founded in 1963, Medical & Biological Engineering & Computing (MBEC) continues to serve the biomedical engineering community, covering the entire spectrum of biomedical and clinical engineering. The journal presents exciting and vital experimental and theoretical developments in biomedical science and technology, and reports on advances in computer-based methodologies in these multidisciplinary subjects. The journal also incorporates new and evolving technologies including cellular engineering and molecular imaging.
MBEC publishes original research articles as well as reviews and technical notes. Its Rapid Communications category focuses on material of immediate value to the readership, while the Controversies section provides a forum to exchange views on selected issues, stimulating a vigorous and informed debate in this exciting and high profile field.
MBEC is an official journal of the International Federation of Medical and Biological Engineering (IFMBE).



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
