{"title":"Upscaling the production of sterile male mosquitoes with an automated pupa sex sorter","authors":"Jun-Tao Gong, Wadaka Mamai, Xiaohua Wang, Jian Zhu, Yongjun Li, Julian Liu, Qixian Tang, Yuanhui Huang, Jixin Zhang, Jiayi Zhou, Hamidou Maiga, Nanwintoum Séverin Bimbilé Somda, Claudia Martina, Simran Singh Kotla, Thomas Wallner, Jérémy Bouyer, Zhiyong Xi","doi":"10.1126/scirobotics.adj6261","DOIUrl":null,"url":null,"abstract":"<div >Effective mosquito population suppression has been repeatedly demonstrated in field trials through the release of male mosquitoes to induce sterile mating with wild females using the incompatible insect technique (IIT), the sterile insect technique (SIT), or their combination. However, upscaling these techniques requires a highly efficient and scalable approach for the sex separation of mass-reared mosquitoes to minimize the unintentional release of females, which can lead to either population replacement or biting nuisance, a major bottleneck up to now. Here, we report the successful development of an automated mosquito pupa sex sorter that can effectively separate large numbers of males from females for population suppression of <i>Aedes aegypti</i>, <i>A. albopictus</i>, and <i>Culex quinquefasciatus</i>. The male production capacity of the automated sex sorter was increased by ~17-fold compared with manual sex separation with the Fay-Morlan sorter and enabled one person to separate 16 million males per week. With ~0.5% female contamination, the produced males exhibited high flight ability and mating performance. The field trial demonstrates that the quality of <i>A. albopictus</i> males produced using the automated sex sorter is suitable for inducing population suppression. These results indicate that the automated sex sorter offers the potential to upscale IIT and SIT against mosquito vectors for disease control.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 92","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-07-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adj6261","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adj6261","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
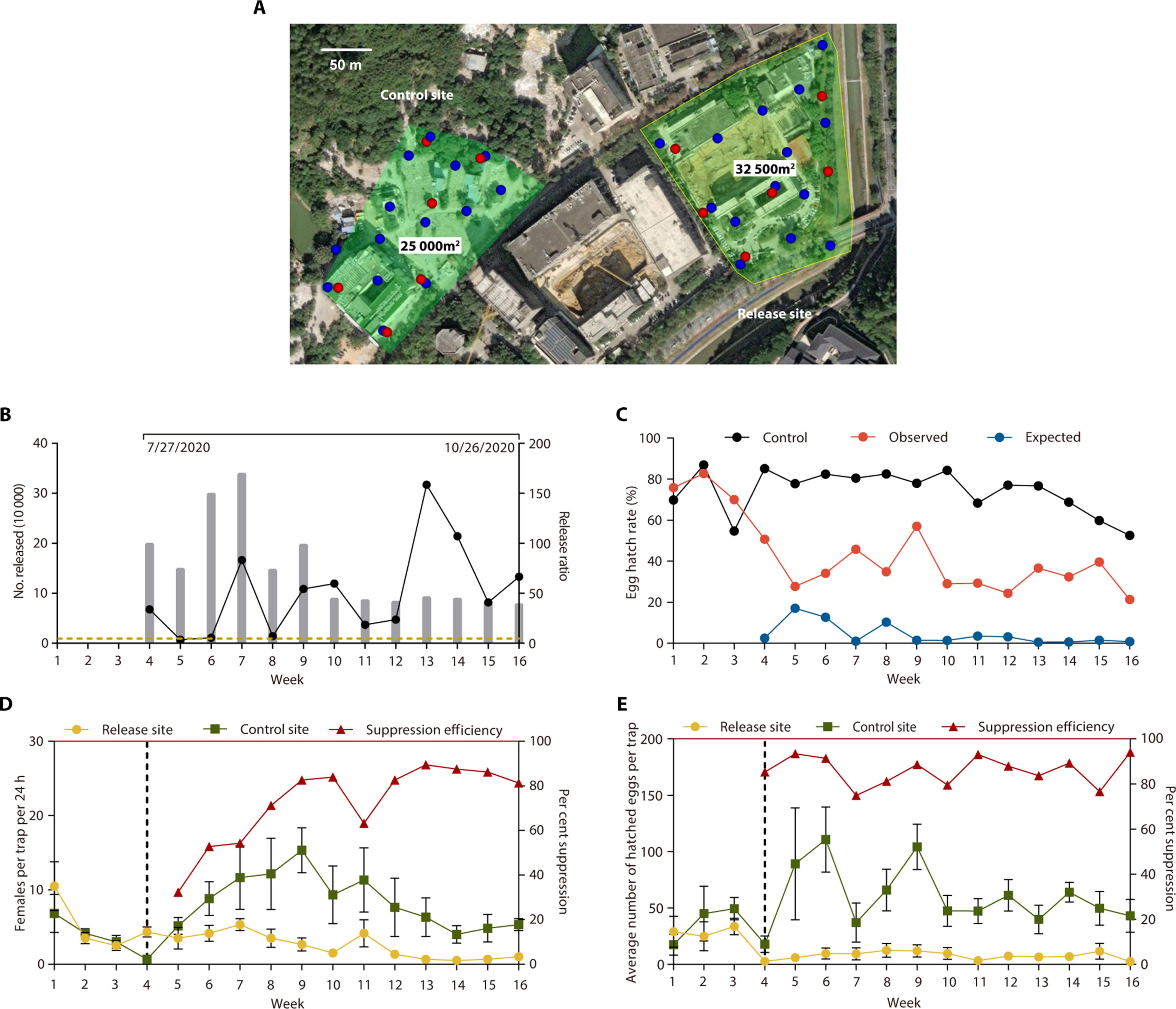
Effective mosquito population suppression has been repeatedly demonstrated in field trials through the release of male mosquitoes to induce sterile mating with wild females using the incompatible insect technique (IIT), the sterile insect technique (SIT), or their combination. However, upscaling these techniques requires a highly efficient and scalable approach for the sex separation of mass-reared mosquitoes to minimize the unintentional release of females, which can lead to either population replacement or biting nuisance, a major bottleneck up to now. Here, we report the successful development of an automated mosquito pupa sex sorter that can effectively separate large numbers of males from females for population suppression of Aedes aegypti, A. albopictus, and Culex quinquefasciatus. The male production capacity of the automated sex sorter was increased by ~17-fold compared with manual sex separation with the Fay-Morlan sorter and enabled one person to separate 16 million males per week. With ~0.5% female contamination, the produced males exhibited high flight ability and mating performance. The field trial demonstrates that the quality of A. albopictus males produced using the automated sex sorter is suitable for inducing population suppression. These results indicate that the automated sex sorter offers the potential to upscale IIT and SIT against mosquito vectors for disease control.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
