Yuan Liu, Quanliang Cao, Haifeng Xu and Gungun Lin
{"title":"Flow tweezing of anisotropic magnetic microrobots in a dynamic magnetic trap for active retention and localized flow sensing","authors":"Yuan Liu, Quanliang Cao, Haifeng Xu and Gungun Lin","doi":"10.1039/D4LC00474D","DOIUrl":null,"url":null,"abstract":"<p >Controlled manipulation of microscale robotic devices in complex fluidic networks is critical for various applications in biomedical endovascular sensing, lab-on-chip biochemical assays, and environmental monitoring. However, achieving controlled transport and active retention of microscale robots with flow sensing capability has proven to be challenging. Here, we report the dynamic tweezing of an anisotropic magnetic microrobot in a rotating magnetic trap for active retention and localized flow sensing under confined fluidic conditions. We reveal a series of unconventional motion modes and the dynamics of the microrobot transporting in a confined fluidic flow, which manifest themselves as transitions from on-trap centre rolling to large-area revolution and off-trap centre rolling with varying rotating frequencies. By retaining the robot within the magnetic trap and its motion modulated by the field frequency, the off-centre rolling of the microrobot endows it with crucial localized flow sensing capabilities, including flow rate and flow direction determination. The magnetic microrobot serves as a mobile platform for measuring the flow profile along a curved channel, mimicking a blood vessel. Our findings unlock a new strategy to determine the local magnetic tweezing force profile and flow conditions in arbitrary flow channels, revealing strong potential for microfluidics, chemical reactors, and <em>in vivo</em> endovascular flow measurement.</p>","PeriodicalId":85,"journal":{"name":"Lab on a Chip","volume":" 18","pages":" 4242-4252"},"PeriodicalIF":5.4000,"publicationDate":"2024-08-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Lab on a Chip","FirstCategoryId":"5","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/lc/d4lc00474d","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"BIOCHEMICAL RESEARCH METHODS","Score":null,"Total":0}
引用次数: 0
Abstract
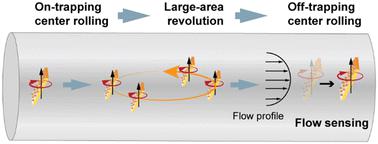
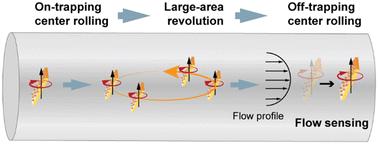
Controlled manipulation of microscale robotic devices in complex fluidic networks is critical for various applications in biomedical endovascular sensing, lab-on-chip biochemical assays, and environmental monitoring. However, achieving controlled transport and active retention of microscale robots with flow sensing capability has proven to be challenging. Here, we report the dynamic tweezing of an anisotropic magnetic microrobot in a rotating magnetic trap for active retention and localized flow sensing under confined fluidic conditions. We reveal a series of unconventional motion modes and the dynamics of the microrobot transporting in a confined fluidic flow, which manifest themselves as transitions from on-trap centre rolling to large-area revolution and off-trap centre rolling with varying rotating frequencies. By retaining the robot within the magnetic trap and its motion modulated by the field frequency, the off-centre rolling of the microrobot endows it with crucial localized flow sensing capabilities, including flow rate and flow direction determination. The magnetic microrobot serves as a mobile platform for measuring the flow profile along a curved channel, mimicking a blood vessel. Our findings unlock a new strategy to determine the local magnetic tweezing force profile and flow conditions in arbitrary flow channels, revealing strong potential for microfluidics, chemical reactors, and in vivo endovascular flow measurement.
期刊介绍:
Lab on a Chip is the premiere journal that publishes cutting-edge research in the field of miniaturization. By their very nature, microfluidic/nanofluidic/miniaturized systems are at the intersection of disciplines, spanning fundamental research to high-end application, which is reflected by the broad readership of the journal. Lab on a Chip publishes two types of papers on original research: full-length research papers and communications. Papers should demonstrate innovations, which can come from technical advancements or applications addressing pressing needs in globally important areas. The journal also publishes Comments, Reviews, and Perspectives.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
