Junhyuk Bang, Seok Hwan Choi, Kyung Rok Pyun, Yeongju Jung, Sangwoo Hong, Dohyung Kim, Youngseok Lee, Daeyeon Won, Seongmin Jeong, Wooseop Shin, Seung Hwan Ko
{"title":"Bioinspired electronics for intelligent soft robots","authors":"Junhyuk Bang, Seok Hwan Choi, Kyung Rok Pyun, Yeongju Jung, Sangwoo Hong, Dohyung Kim, Youngseok Lee, Daeyeon Won, Seongmin Jeong, Wooseop Shin, Seung Hwan Ko","doi":"10.1038/s44287-024-00081-2","DOIUrl":null,"url":null,"abstract":"Soft robots, capable of safe interaction with delicate objects through their flexibility and compliance, are attracting attention in various real-world applications as manipulators, biomedical devices and wearable tools. As these technologies advance, the ability to perform complex tasks in a robust and reliable way becomes essential. Thus, the incorporation of embedded intelligence in soft robots, which enables them to perceive external environments and generate appropriate actions, is increasingly important. Inspiration from sophisticated biological systems, which exhibit optimized behaviours through the acquisition of external information, promotes the development of intelligent soft robots. Here, we introduce biomimicry strategies for intelligent soft robotics and highlight progress in how soft robots interact with their environment and perform tasks. First, we discuss sensors inspired by the sensory nervous systems and soft actuators inspired by the musculoskeletal systems. Furthermore, we investigate various applications such as manipulation, exploration, wearable devices, biomedical devices and imperceptible devices. We conclude discussing the challenges and offering a perspective on the future direction of this field. Soft robots are evolving to perform increasingly complex tasks, with biomimicry having a fundamental role in their development. This Review details biomimetic strategies and pivotal advances in sensors, actuators and applications of intelligent soft robotics.","PeriodicalId":501701,"journal":{"name":"Nature Reviews Electrical Engineering","volume":"1 9","pages":"597-613"},"PeriodicalIF":0.0000,"publicationDate":"2024-08-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Reviews Electrical Engineering","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44287-024-00081-2","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
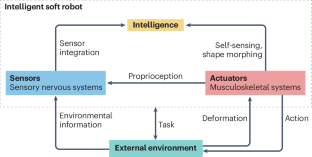
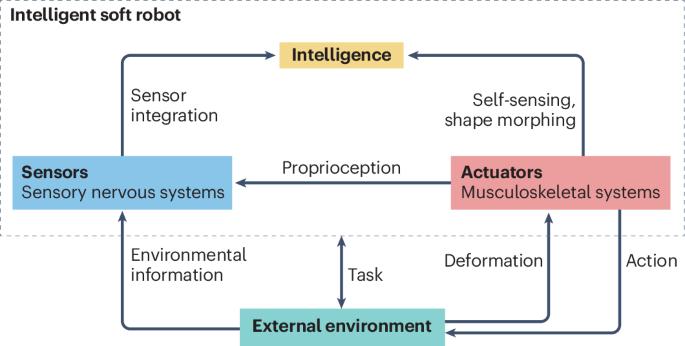
Soft robots, capable of safe interaction with delicate objects through their flexibility and compliance, are attracting attention in various real-world applications as manipulators, biomedical devices and wearable tools. As these technologies advance, the ability to perform complex tasks in a robust and reliable way becomes essential. Thus, the incorporation of embedded intelligence in soft robots, which enables them to perceive external environments and generate appropriate actions, is increasingly important. Inspiration from sophisticated biological systems, which exhibit optimized behaviours through the acquisition of external information, promotes the development of intelligent soft robots. Here, we introduce biomimicry strategies for intelligent soft robotics and highlight progress in how soft robots interact with their environment and perform tasks. First, we discuss sensors inspired by the sensory nervous systems and soft actuators inspired by the musculoskeletal systems. Furthermore, we investigate various applications such as manipulation, exploration, wearable devices, biomedical devices and imperceptible devices. We conclude discussing the challenges and offering a perspective on the future direction of this field. Soft robots are evolving to perform increasingly complex tasks, with biomimicry having a fundamental role in their development. This Review details biomimetic strategies and pivotal advances in sensors, actuators and applications of intelligent soft robotics.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
