Wei Tang, Yidan Gao, Zeyu Dong, Dong Han, Vadim V. Gorodov, Elena Y. Kramarenko, Jun Zou
{"title":"Sustainable and untethered soft robots created using printable and recyclable ferromagnetic fibers","authors":"Wei Tang, Yidan Gao, Zeyu Dong, Dong Han, Vadim V. Gorodov, Elena Y. Kramarenko, Jun Zou","doi":"10.1007/s42242-024-00303-4","DOIUrl":null,"url":null,"abstract":"<p>Integrated printing of magnetic soft robots with complex structures using recyclable materials to achieve sustainability of the soft robots remains a persistent challenge. Here, we propose a kind of ferromagnetic fibers that can be used to print soft robots with complex structures. These ferromagnetic fibers are recyclable and can make soft robots sustainable. The ferromagnetic fibers based on thermoplastic polyurethane (TPU)/NdFeB hybrid particles are extruded by an extruder. We use a desktop three-dimensional (3D) printer to demonstrate the feasibility of printing two-dimensional (2D) and complex 3D soft robots. These printed soft robots can be recycled and reprinted into new robots once their tasks are completed. Moreover, these robots show almost no difference in actuation capability compared to prior versions and have new functions. Successful applications include lifting, grasping, and moving objects, and these functions can be operated untethered wirelessly. In addition, the locomotion of the magnetic soft robot in a human stomach model shows the prospect of medical applications. Overall, these fully recyclable ferromagnetic fibers pave the way for printing and reprinting sustainable soft robots while also effectively reducing e-waste and robotics waste materials, which is important for resource conservation and environmental protection.</p><h3 data-test=\"abstract-sub-heading\">Graphic abstract</h3>","PeriodicalId":48627,"journal":{"name":"Bio-Design and Manufacturing","volume":"12 1","pages":""},"PeriodicalIF":7.6000,"publicationDate":"2024-08-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Bio-Design and Manufacturing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s42242-024-00303-4","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
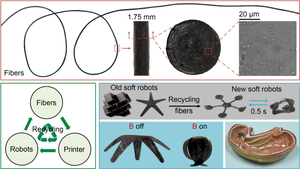
Integrated printing of magnetic soft robots with complex structures using recyclable materials to achieve sustainability of the soft robots remains a persistent challenge. Here, we propose a kind of ferromagnetic fibers that can be used to print soft robots with complex structures. These ferromagnetic fibers are recyclable and can make soft robots sustainable. The ferromagnetic fibers based on thermoplastic polyurethane (TPU)/NdFeB hybrid particles are extruded by an extruder. We use a desktop three-dimensional (3D) printer to demonstrate the feasibility of printing two-dimensional (2D) and complex 3D soft robots. These printed soft robots can be recycled and reprinted into new robots once their tasks are completed. Moreover, these robots show almost no difference in actuation capability compared to prior versions and have new functions. Successful applications include lifting, grasping, and moving objects, and these functions can be operated untethered wirelessly. In addition, the locomotion of the magnetic soft robot in a human stomach model shows the prospect of medical applications. Overall, these fully recyclable ferromagnetic fibers pave the way for printing and reprinting sustainable soft robots while also effectively reducing e-waste and robotics waste materials, which is important for resource conservation and environmental protection.
期刊介绍:
Bio-Design and Manufacturing reports new research, new technology and new applications in the field of biomanufacturing, especially 3D bioprinting. Topics of Bio-Design and Manufacturing cover tissue engineering, regenerative medicine, mechanical devices from the perspectives of materials, biology, medicine and mechanical engineering, with a focus on manufacturing science and technology to fulfil the requirement of bio-design.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
