Weiyi Wang, Jing Li, Shijing Zhang, Jie Deng, Weishan Chen, Yingxiang Liu
{"title":"A snail-inspired traveling-wave-driven miniature piezoelectric robot","authors":"Weiyi Wang, Jing Li, Shijing Zhang, Jie Deng, Weishan Chen, Yingxiang Liu","doi":"10.1016/j.xcrp.2024.102201","DOIUrl":null,"url":null,"abstract":"<p>The phenomenon of using traveling waves is widely observed in organisms like centipedes, stingrays, and snails. Energy is uniformly distributed through wave propagation, reducing energy loss and enhancing motion efficiency. This offers valuable guidance for designing robots. Here, we report a miniature robot emulating the traveling-wave behavior of snails. A single-frame robot is designed with a rigid square-frame structure and four piezoelectric ceramics to generate traveling waves. The robot achieves a linear speed of 12 body lengths per second (BL/s), with a volume of 27.5 × 26 × 4 mm<sup>3</sup> and a weight of 7.9 g. Two-dimensional planar motion is realized by connecting two single-frame robots to form a double-frame robot, achieving a linear speed of 12 BL/s, a rotational speed of 690°/s, and a load capacity of 200 g. An integrated robot, combining a customized power supply and an image acquisition system, achieves untethered motion and image perception. This work provides a valuable design reference for miniature robots.</p>","PeriodicalId":9703,"journal":{"name":"Cell Reports Physical Science","volume":"32 1","pages":""},"PeriodicalIF":7.3000,"publicationDate":"2024-09-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cell Reports Physical Science","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1016/j.xcrp.2024.102201","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
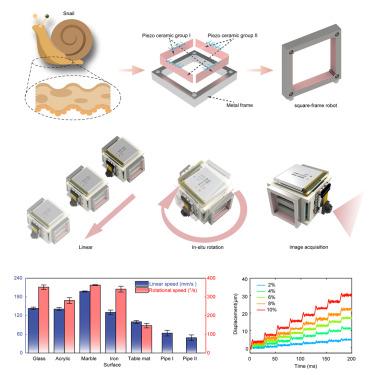
The phenomenon of using traveling waves is widely observed in organisms like centipedes, stingrays, and snails. Energy is uniformly distributed through wave propagation, reducing energy loss and enhancing motion efficiency. This offers valuable guidance for designing robots. Here, we report a miniature robot emulating the traveling-wave behavior of snails. A single-frame robot is designed with a rigid square-frame structure and four piezoelectric ceramics to generate traveling waves. The robot achieves a linear speed of 12 body lengths per second (BL/s), with a volume of 27.5 × 26 × 4 mm3 and a weight of 7.9 g. Two-dimensional planar motion is realized by connecting two single-frame robots to form a double-frame robot, achieving a linear speed of 12 BL/s, a rotational speed of 690°/s, and a load capacity of 200 g. An integrated robot, combining a customized power supply and an image acquisition system, achieves untethered motion and image perception. This work provides a valuable design reference for miniature robots.
期刊介绍:
Cell Reports Physical Science, a premium open-access journal from Cell Press, features high-quality, cutting-edge research spanning the physical sciences. It serves as an open forum fostering collaboration among physical scientists while championing open science principles. Published works must signify significant advancements in fundamental insight or technological applications within fields such as chemistry, physics, materials science, energy science, engineering, and related interdisciplinary studies. In addition to longer articles, the journal considers impactful short-form reports and short reviews covering recent literature in emerging fields. Continually adapting to the evolving open science landscape, the journal reviews its policies to align with community consensus and best practices.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
