Keisuke Takehana, Shino Kizaki, Tomomi Tanaka, Kentaro Uno, Kazuya Yoshida
{"title":"Comparison of lunar rover wheel performance in soils with different cohesive properties","authors":"Keisuke Takehana, Shino Kizaki, Tomomi Tanaka, Kentaro Uno, Kazuya Yoshida","doi":"10.1016/j.jterra.2024.101011","DOIUrl":null,"url":null,"abstract":"<div><p>Wheeled mobile robots, rovers, are highly effective in lunar exploration. However, the lunar regolith can cause wheel slippage, resulting in an inability to travel for the rover. A single-wheel testbed is usually used to analyze a rover wheel’s driving performance. Our experiment can control the rotation and translation of the wheels separately, realizing experiments in any slippage condition. Moreover, this testbed can conduct experiments using regolith simulant with a cohesive property, in addition to Toyoura sand, which is non-cohesive sand collected from the earth.</p><p>This paper presents the results of a driving test on two types of loose soil: Toyoura sand and regolith simulant (FJS-1). The wheel used in the experiment is the preliminary version of the actual flight model of a 10 kg class lunar exploration microrover. The results reveal that the traction performance on both sands improves as the slip ratio increases. The performance did not depend on velocity but on vertical load. It should be noted that the cohesive simulant shows a higher difference in traction performance than Toyoura sand. These findings, measured in detail from the low-slip to the high-slip range, contribute to the actual driving operation of the rover missions.</p></div>","PeriodicalId":50023,"journal":{"name":"Journal of Terramechanics","volume":"117 ","pages":"Article 101011"},"PeriodicalIF":3.7000,"publicationDate":"2025-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0022489824000533/pdfft?md5=f8a0ef69fd48078871449b719c0ec355&pid=1-s2.0-S0022489824000533-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Terramechanics","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0022489824000533","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/13 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, ENVIRONMENTAL","Score":null,"Total":0}
引用次数: 0
Abstract
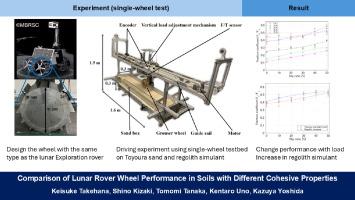
Wheeled mobile robots, rovers, are highly effective in lunar exploration. However, the lunar regolith can cause wheel slippage, resulting in an inability to travel for the rover. A single-wheel testbed is usually used to analyze a rover wheel’s driving performance. Our experiment can control the rotation and translation of the wheels separately, realizing experiments in any slippage condition. Moreover, this testbed can conduct experiments using regolith simulant with a cohesive property, in addition to Toyoura sand, which is non-cohesive sand collected from the earth.
This paper presents the results of a driving test on two types of loose soil: Toyoura sand and regolith simulant (FJS-1). The wheel used in the experiment is the preliminary version of the actual flight model of a 10 kg class lunar exploration microrover. The results reveal that the traction performance on both sands improves as the slip ratio increases. The performance did not depend on velocity but on vertical load. It should be noted that the cohesive simulant shows a higher difference in traction performance than Toyoura sand. These findings, measured in detail from the low-slip to the high-slip range, contribute to the actual driving operation of the rover missions.
期刊介绍:
The Journal of Terramechanics is primarily devoted to scientific articles concerned with research, design, and equipment utilization in the field of terramechanics.
The Journal of Terramechanics is the leading international journal serving the multidisciplinary global off-road vehicle and soil working machinery industries, and related user community, governmental agencies and universities.
The Journal of Terramechanics provides a forum for those involved in research, development, design, innovation, testing, application and utilization of off-road vehicles and soil working machinery, and their sub-systems and components. The Journal presents a cross-section of technical papers, reviews, comments and discussions, and serves as a medium for recording recent progress in the field.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
