Stefania Konstantinidi , Markus Koenigsdorff , Thomas Martinez , Amine Benouhiba , Johannes Mersch , Yoan Civet , Gerald Gerlach , Yves Perriard
{"title":"Investigation of buckling instabilities in fiber-reinforced DEAs","authors":"Stefania Konstantinidi , Markus Koenigsdorff , Thomas Martinez , Amine Benouhiba , Johannes Mersch , Yoan Civet , Gerald Gerlach , Yves Perriard","doi":"10.1016/j.compscitech.2024.110849","DOIUrl":null,"url":null,"abstract":"<div><p>Artificial muscles, designed to replicate the movements of natural biological muscles, hold significant promise in the fields of robotics and prosthetics. Recent advancements have led to the development of fiber-reinforced actuators, drawing inspiration from biological tissues. Dielectric elastomer actuators (DEAs) are a type of electroactive artificial muscle. It is possible to enhance the uni-axial deformation of DEAs by constraining and applying pre-stretch on the actuator membrane. This can be achieved through uni-directional fibers bonded to the DEA that lead to transversely isotropic properties. However, combining membrane pre-stretch and fiber reinforcement may lead to instabilities such as fiber buckling due to the compressive load of the pre-stretched membrane or due to wrinkling during actuation. Understanding these instabilities is crucial as they can significantly impact the performance. A novel model taking into consideration these instabilities is established and experimentally validated. By calculating the force in the fiber direction, the buckling profile such as the wavelength and amplitude can be predicted. The validation of the model presented along with an extensive experimental investigation allow for a comprehensive analysis to explore the impact of fiber buckling on the performance and the force of uni-axial DEAs.</p></div>","PeriodicalId":283,"journal":{"name":"Composites Science and Technology","volume":"258 ","pages":"Article 110849"},"PeriodicalIF":9.8000,"publicationDate":"2024-11-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0266353824004196/pdfft?md5=de2e93ab5b973c831d3aa2f93d39b75b&pid=1-s2.0-S0266353824004196-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Composites Science and Technology","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0266353824004196","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/10 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"MATERIALS SCIENCE, COMPOSITES","Score":null,"Total":0}
引用次数: 0
Abstract
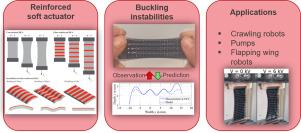
Artificial muscles, designed to replicate the movements of natural biological muscles, hold significant promise in the fields of robotics and prosthetics. Recent advancements have led to the development of fiber-reinforced actuators, drawing inspiration from biological tissues. Dielectric elastomer actuators (DEAs) are a type of electroactive artificial muscle. It is possible to enhance the uni-axial deformation of DEAs by constraining and applying pre-stretch on the actuator membrane. This can be achieved through uni-directional fibers bonded to the DEA that lead to transversely isotropic properties. However, combining membrane pre-stretch and fiber reinforcement may lead to instabilities such as fiber buckling due to the compressive load of the pre-stretched membrane or due to wrinkling during actuation. Understanding these instabilities is crucial as they can significantly impact the performance. A novel model taking into consideration these instabilities is established and experimentally validated. By calculating the force in the fiber direction, the buckling profile such as the wavelength and amplitude can be predicted. The validation of the model presented along with an extensive experimental investigation allow for a comprehensive analysis to explore the impact of fiber buckling on the performance and the force of uni-axial DEAs.
人造肌肉旨在复制天然生物肌肉的运动,在机器人和假肢领域大有可为。最近,人们从生物组织中汲取灵感,开发出了纤维增强致动器。介电弹性体致动器(DEA)是一种电活性人造肌肉。通过对致动器薄膜施加约束和预拉伸,可以增强 DEA 的单轴变形。这可以通过与 DEA 粘合的单向纤维来实现,从而产生横向各向同性的特性。然而,将膜预拉伸和纤维加固相结合可能会导致不稳定性,例如由于预拉伸膜的压缩负荷或在致动过程中的起皱导致纤维弯曲。了解这些不稳定性至关重要,因为它们会对性能产生重大影响。我们建立了一个考虑到这些不稳定性的新模型,并通过实验进行了验证。通过计算纤维方向上的力,可以预测屈曲曲线,如波长和振幅。通过对模型的验证和广泛的实验研究,可以进行综合分析,探索纤维屈曲对单轴 DEA 性能和力的影响。
期刊介绍:
Composites Science and Technology publishes refereed original articles on the fundamental and applied science of engineering composites. The focus of this journal is on polymeric matrix composites with reinforcements/fillers ranging from nano- to macro-scale. CSTE encourages manuscripts reporting unique, innovative contributions to the physics, chemistry, materials science and applied mechanics aspects of advanced composites.
Besides traditional fiber reinforced composites, novel composites with significant potential for engineering applications are encouraged.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
