Robert Baines, Frank Fish, Josh Bongard, Rebecca Kramer-Bottiglio
{"title":"Robots that evolve on demand","authors":"Robert Baines, Frank Fish, Josh Bongard, Rebecca Kramer-Bottiglio","doi":"10.1038/s41578-024-00711-z","DOIUrl":null,"url":null,"abstract":"Now more than ever, researchers are rethinking the way robots are designed and controlled — from the algorithms that govern their actions to the very atomic structure of the materials they are made from. In this Perspective, we collect and comment on recent efforts towards multipurpose machines that use shape-morphing materials and components to adapt to changing environments. To frame our discussion, we point out biological adaptation strategies that have been adopted by robots across different sizes and timescales. This contextualization segways into the notion of adaptive morphogenesis, which is formally defined as a design strategy in which adaptive robot morphology and behaviours are realized through unified structural and actuation systems. However, since its introduction, the term has been more colloquially used to describe ‘evolution on demand’. We set out by giving examples of current systems that exhibit adaptive morphogenesis. Then, outlining projected key application areas of adaptive morphogenesis helps to scope the challenges and possibilities on the road to realizing future systems. We conclude by proposing performance metrics for benchmarking this emerging field. With this Perspective, we hope to spur dialogue among materials scientists, roboticists and biologists, and provide an objective lens through which we can analyse progress towards robots with rapidly mutable features that eclipse what is possible in biological processes. To meet the physical demands of a new environment, organisms evolve morphological and behavioural adaptations that specialize their locomotor performance to that niche. This Perspective discusses how robots can emulate — and perhaps even exceed — biological levels of adaptability through shape-morphing mechanisms and complementary control strategies to achieve compressed, rapid and reversible ‘evolution on demand’.","PeriodicalId":19081,"journal":{"name":"Nature Reviews Materials","volume":"9 11","pages":"822-835"},"PeriodicalIF":86.2000,"publicationDate":"2024-09-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Reviews Materials","FirstCategoryId":"88","ListUrlMain":"https://www.nature.com/articles/s41578-024-00711-z","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
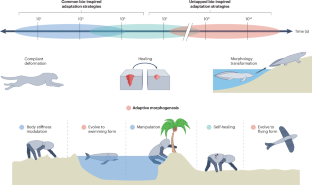
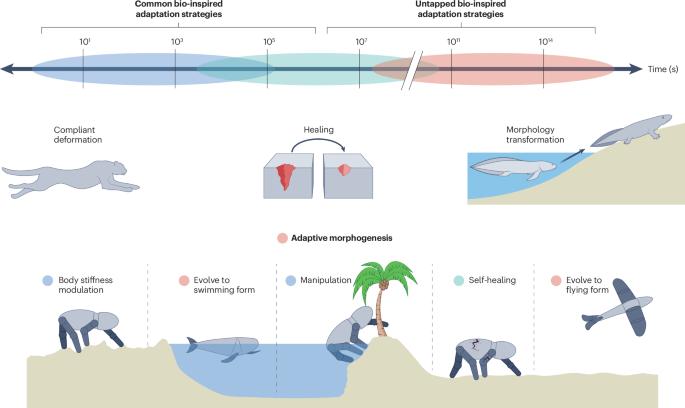
Now more than ever, researchers are rethinking the way robots are designed and controlled — from the algorithms that govern their actions to the very atomic structure of the materials they are made from. In this Perspective, we collect and comment on recent efforts towards multipurpose machines that use shape-morphing materials and components to adapt to changing environments. To frame our discussion, we point out biological adaptation strategies that have been adopted by robots across different sizes and timescales. This contextualization segways into the notion of adaptive morphogenesis, which is formally defined as a design strategy in which adaptive robot morphology and behaviours are realized through unified structural and actuation systems. However, since its introduction, the term has been more colloquially used to describe ‘evolution on demand’. We set out by giving examples of current systems that exhibit adaptive morphogenesis. Then, outlining projected key application areas of adaptive morphogenesis helps to scope the challenges and possibilities on the road to realizing future systems. We conclude by proposing performance metrics for benchmarking this emerging field. With this Perspective, we hope to spur dialogue among materials scientists, roboticists and biologists, and provide an objective lens through which we can analyse progress towards robots with rapidly mutable features that eclipse what is possible in biological processes. To meet the physical demands of a new environment, organisms evolve morphological and behavioural adaptations that specialize their locomotor performance to that niche. This Perspective discusses how robots can emulate — and perhaps even exceed — biological levels of adaptability through shape-morphing mechanisms and complementary control strategies to achieve compressed, rapid and reversible ‘evolution on demand’.
期刊介绍:
Nature Reviews Materials is an online-only journal that is published weekly. It covers a wide range of scientific disciplines within materials science. The journal includes Reviews, Perspectives, and Comments.
Nature Reviews Materials focuses on various aspects of materials science, including the making, measuring, modelling, and manufacturing of materials. It examines the entire process of materials science, from laboratory discovery to the development of functional devices.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
