Vinish Yogesh , Lisanne Grevinga , Carsten Voort , Jaap H. Buurke , Peter H. Veltink , Chris T.M. Baten
{"title":"Novel calibration method for improved UWB sensor distance measurement in the context of application for 3D analysis of human movement","authors":"Vinish Yogesh , Lisanne Grevinga , Carsten Voort , Jaap H. Buurke , Peter H. Veltink , Chris T.M. Baten","doi":"10.1016/j.jestch.2024.101844","DOIUrl":null,"url":null,"abstract":"<div><div>Integrated UWB and MIMU sensor systems have become popular for pedestrian tracking and indoor localization, since this facilitates data fusion that improves position estimation accuracy by exploiting the complementary nature of their error sources. Integrated UWB/MIMU sensors also have great potential in only on-body use for 3D analysis of human movement, as with MIMU sensors alone accurate direct estimation of (relative) body segment position is not possible. For this, a position estimation accuracy with errors smaller than 1 cm is deemed required. The lowest position estimating error with integrated UWB/MIMU systems, reported so far, is around 5 cm. The main accuracy limiting factors were found to be the systematic errors in the distance estimates from the UWB sensor. Multiple reported attempts to calibrate for these systematic errors failed to achieve the desired accuracy. This article presents a novel distance-bias calibration method that minimizes the residual systematic distance estimate errors using multiple sensors in a swarm configuration. Validation was performed against synthetic reference data and against reference data measured with an optical motion tracking system. Significantly reduced systematic distance estimate errors (≤0.5 cm) were found. These results promise to facilitate significantly better position estimates in future UWB/MIMU data fusion.</div></div>","PeriodicalId":48609,"journal":{"name":"Engineering Science and Technology-An International Journal-Jestech","volume":"58 ","pages":"Article 101844"},"PeriodicalIF":5.4000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Science and Technology-An International Journal-Jestech","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2215098624002301","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/28 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
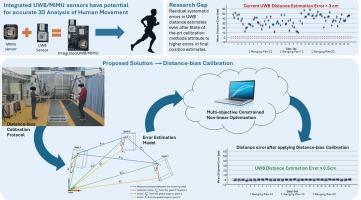
Integrated UWB and MIMU sensor systems have become popular for pedestrian tracking and indoor localization, since this facilitates data fusion that improves position estimation accuracy by exploiting the complementary nature of their error sources. Integrated UWB/MIMU sensors also have great potential in only on-body use for 3D analysis of human movement, as with MIMU sensors alone accurate direct estimation of (relative) body segment position is not possible. For this, a position estimation accuracy with errors smaller than 1 cm is deemed required. The lowest position estimating error with integrated UWB/MIMU systems, reported so far, is around 5 cm. The main accuracy limiting factors were found to be the systematic errors in the distance estimates from the UWB sensor. Multiple reported attempts to calibrate for these systematic errors failed to achieve the desired accuracy. This article presents a novel distance-bias calibration method that minimizes the residual systematic distance estimate errors using multiple sensors in a swarm configuration. Validation was performed against synthetic reference data and against reference data measured with an optical motion tracking system. Significantly reduced systematic distance estimate errors (≤0.5 cm) were found. These results promise to facilitate significantly better position estimates in future UWB/MIMU data fusion.
期刊介绍:
Engineering Science and Technology, an International Journal (JESTECH) (formerly Technology), a peer-reviewed quarterly engineering journal, publishes both theoretical and experimental high quality papers of permanent interest, not previously published in journals, in the field of engineering and applied science which aims to promote the theory and practice of technology and engineering. In addition to peer-reviewed original research papers, the Editorial Board welcomes original research reports, state-of-the-art reviews and communications in the broadly defined field of engineering science and technology.
The scope of JESTECH includes a wide spectrum of subjects including:
-Electrical/Electronics and Computer Engineering (Biomedical Engineering and Instrumentation; Coding, Cryptography, and Information Protection; Communications, Networks, Mobile Computing and Distributed Systems; Compilers and Operating Systems; Computer Architecture, Parallel Processing, and Dependability; Computer Vision and Robotics; Control Theory; Electromagnetic Waves, Microwave Techniques and Antennas; Embedded Systems; Integrated Circuits, VLSI Design, Testing, and CAD; Microelectromechanical Systems; Microelectronics, and Electronic Devices and Circuits; Power, Energy and Energy Conversion Systems; Signal, Image, and Speech Processing)
-Mechanical and Civil Engineering (Automotive Technologies; Biomechanics; Construction Materials; Design and Manufacturing; Dynamics and Control; Energy Generation, Utilization, Conversion, and Storage; Fluid Mechanics and Hydraulics; Heat and Mass Transfer; Micro-Nano Sciences; Renewable and Sustainable Energy Technologies; Robotics and Mechatronics; Solid Mechanics and Structure; Thermal Sciences)
-Metallurgical and Materials Engineering (Advanced Materials Science; Biomaterials; Ceramic and Inorgnanic Materials; Electronic-Magnetic Materials; Energy and Environment; Materials Characterizastion; Metallurgy; Polymers and Nanocomposites)



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
