Zihan Wang , Wenjian Li , Chuang Li , Anke Klingner , Yutao Pei , Sarthak Misra , Islam S.M. Khalil
{"title":"Magnetic alginate microrobots with dual-motion patterns through centrifugally driven flow control","authors":"Zihan Wang , Wenjian Li , Chuang Li , Anke Klingner , Yutao Pei , Sarthak Misra , Islam S.M. Khalil","doi":"10.1016/j.matdes.2024.113337","DOIUrl":null,"url":null,"abstract":"<div><div>Mobile microrobots have gained increasing attention in biomedical applications because they can be precisely actuated to targeted positions in a tiny space. However, their use in biomedical applications is hindered by the costly and complicated fabrication method. Herein, a facile fabrication method is proposed to produce magnetic alginate microrobots with adjustable dimensions, including teardrop and tadpole shapes, via tunable centrifugally-driven flows. The formation of these microrobots is interpreted by finite element analysis, revealing that the transition between the dripping and jetting regimes of the flow alters the microrobot's shape. The dimensions of the microrobots are quantitatively analyzed based on the flow's extrusion velocity, controlled by nozzle diameters and revolution speeds. Incorporating magnetic nanoparticles into the alginate-based hydrogel enables the microrobots to exhibit distinct motion patterns under a magnetic field. The teardrop-like microrobot can reach a maximum rolling velocity of approximately 2.7 body length s<sup>−1</sup> at 2 Hz, while the maximum stick-slip velocity of the tadpole-like microrobot reaches about 0.42 body length s<sup>−1</sup> at 5 Hz, comparable to the existing bioinspired magnetic microrobots. These two motion patterns allow the microrobot to overcome obstacles and navigate in vertically constrained environments, respectively. Last, an ultrasound imaging system is deployed to monitor the locomotion and degradation of the microrobots, showing their potential for targeted drug delivery applications.</div></div>","PeriodicalId":383,"journal":{"name":"Materials & Design","volume":"246 ","pages":"Article 113337"},"PeriodicalIF":7.9000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Materials & Design","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0264127524007123","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/27 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
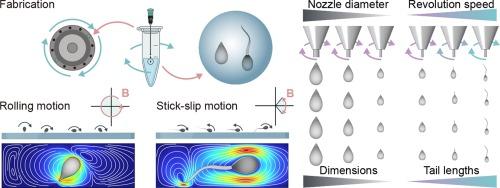
Mobile microrobots have gained increasing attention in biomedical applications because they can be precisely actuated to targeted positions in a tiny space. However, their use in biomedical applications is hindered by the costly and complicated fabrication method. Herein, a facile fabrication method is proposed to produce magnetic alginate microrobots with adjustable dimensions, including teardrop and tadpole shapes, via tunable centrifugally-driven flows. The formation of these microrobots is interpreted by finite element analysis, revealing that the transition between the dripping and jetting regimes of the flow alters the microrobot's shape. The dimensions of the microrobots are quantitatively analyzed based on the flow's extrusion velocity, controlled by nozzle diameters and revolution speeds. Incorporating magnetic nanoparticles into the alginate-based hydrogel enables the microrobots to exhibit distinct motion patterns under a magnetic field. The teardrop-like microrobot can reach a maximum rolling velocity of approximately 2.7 body length s−1 at 2 Hz, while the maximum stick-slip velocity of the tadpole-like microrobot reaches about 0.42 body length s−1 at 5 Hz, comparable to the existing bioinspired magnetic microrobots. These two motion patterns allow the microrobot to overcome obstacles and navigate in vertically constrained environments, respectively. Last, an ultrasound imaging system is deployed to monitor the locomotion and degradation of the microrobots, showing their potential for targeted drug delivery applications.
期刊介绍:
Materials and Design is a multi-disciplinary journal that publishes original research reports, review articles, and express communications. The journal focuses on studying the structure and properties of inorganic and organic materials, advancements in synthesis, processing, characterization, and testing, the design of materials and engineering systems, and their applications in technology. It aims to bring together various aspects of materials science, engineering, physics, and chemistry.
The journal explores themes ranging from materials to design and aims to reveal the connections between natural and artificial materials, as well as experiment and modeling. Manuscripts submitted to Materials and Design should contain elements of discovery and surprise, as they often contribute new insights into the architecture and function of matter.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
