James Hope, Travis M. Beckerle, Pin-Hao Cheng, Zoey Viavattine, Michael Feldkamp, Skylar M. L. Fausner, Kapil Saxena, Eunsong Ko, Ihor Hryb, Russell E. Carter, Timothy J. Ebner, Suhasa B. Kodandaramaiah
{"title":"Brain-wide neural recordings in mice navigating physical spaces enabled by robotic neural recording headstages","authors":"James Hope, Travis M. Beckerle, Pin-Hao Cheng, Zoey Viavattine, Michael Feldkamp, Skylar M. L. Fausner, Kapil Saxena, Eunsong Ko, Ihor Hryb, Russell E. Carter, Timothy J. Ebner, Suhasa B. Kodandaramaiah","doi":"10.1038/s41592-024-02434-z","DOIUrl":null,"url":null,"abstract":"Technologies that can record neural activity at cellular resolution at multiple spatial and temporal scales are typically much larger than the animals that are being recorded from and are thus limited to recording from head-fixed subjects. Here we have engineered robotic neural recording devices—‘cranial exoskeletons’—that assist mice in maneuvering recording headstages that are orders of magnitude larger and heavier than the mice, while they navigate physical behavioral environments. We discovered optimal controller parameters that enable mice to locomote at physiologically realistic velocities while maintaining natural walking gaits. We show that mice learn to work with the robot to make turns and perform decision-making tasks. Robotic imaging and electrophysiology headstages were used to record recordings of Ca2+ activity of thousands of neurons distributed across the dorsal cortex and spiking activity of hundreds of neurons across multiple brain regions and multiple days, respectively. To avoid head fixation or drawbacks of miniaturized devices for freely moving rodents, a robotic device can move a headstage for microscopy or electrophysiology with the animal, thereby enabling naturalistic behavior.","PeriodicalId":18981,"journal":{"name":"Nature Methods","volume":"21 11","pages":"2171-2181"},"PeriodicalIF":32.1000,"publicationDate":"2024-10-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Methods","FirstCategoryId":"99","ListUrlMain":"https://www.nature.com/articles/s41592-024-02434-z","RegionNum":1,"RegionCategory":"生物学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"BIOCHEMICAL RESEARCH METHODS","Score":null,"Total":0}
引用次数: 0
Abstract
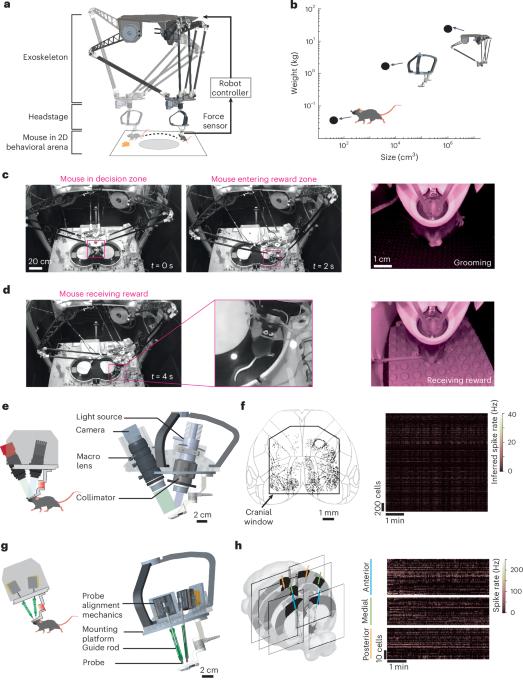
Technologies that can record neural activity at cellular resolution at multiple spatial and temporal scales are typically much larger than the animals that are being recorded from and are thus limited to recording from head-fixed subjects. Here we have engineered robotic neural recording devices—‘cranial exoskeletons’—that assist mice in maneuvering recording headstages that are orders of magnitude larger and heavier than the mice, while they navigate physical behavioral environments. We discovered optimal controller parameters that enable mice to locomote at physiologically realistic velocities while maintaining natural walking gaits. We show that mice learn to work with the robot to make turns and perform decision-making tasks. Robotic imaging and electrophysiology headstages were used to record recordings of Ca2+ activity of thousands of neurons distributed across the dorsal cortex and spiking activity of hundreds of neurons across multiple brain regions and multiple days, respectively. To avoid head fixation or drawbacks of miniaturized devices for freely moving rodents, a robotic device can move a headstage for microscopy or electrophysiology with the animal, thereby enabling naturalistic behavior.
期刊介绍:
Nature Methods is a monthly journal that focuses on publishing innovative methods and substantial enhancements to fundamental life sciences research techniques. Geared towards a diverse, interdisciplinary readership of researchers in academia and industry engaged in laboratory work, the journal offers new tools for research and emphasizes the immediate practical significance of the featured work. It publishes primary research papers and reviews recent technical and methodological advancements, with a particular interest in primary methods papers relevant to the biological and biomedical sciences. This includes methods rooted in chemistry with practical applications for studying biological problems.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
