{"title":"Validation of an indoor real-time location system for tracking sheep","authors":"Jocelyn M. Woods, Sarah J.J. Adcock","doi":"10.1016/j.compag.2024.109535","DOIUrl":null,"url":null,"abstract":"<div><div>Precision livestock technologies such as remote sensors are increasingly used to monitor the health, behavior, and welfare of livestock. We aimed to evaluate the performance of a commercially available ultra-wideband real-time location system (UWB RTLS) for tracking the 2D spatial locations and distances traveled by meat-breed ewes and lambs in an indoor barn. First, we assessed static performance by attaching the sensors to stationary posts and arranging them in a 1 × 1 m grid throughout the barn (29.0 × 11.8 m) for a total of 285 locations. At each post location, the sensors were placed at approximate ewe (0.9 m) and lamb (0.3 m) wither height. The precise 2D locations of each post were recorded using a laser tape measurer and used as the ground truth for comparison to the RTLS’ recorded <em>x</em> and <em>y</em> coordinates. Secondly, we conducted a dynamic validation test to evaluate the positional error and percent error of distances traveled while the sensors were worn by six free-roaming ewes and their singleton lambs. The ground truth locations of each sheep were recorded from video frames every second over 15 min and compared to the RTLS data. Overall static and dynamic error was 0.39 ± 0.20 m (mean ± SD) and 0.53 ± 0.31 m, respectively. Static error was lower in sensors positioned at lamb height than at ewe height, but the opposite pattern was true for dynamic error. Error was higher in pens further from the master anchor. Ground truth and RTLS distances traveled were positively correlated but the RTLS overestimated distances by 54 % on average. In conclusion, the UWB RTLS can acquire precise location estimates that are suitable for a range of scientific and practical applications, but distance estimates should be adjusted to account for overestimation.</div></div>","PeriodicalId":50627,"journal":{"name":"Computers and Electronics in Agriculture","volume":"227 ","pages":"Article 109535"},"PeriodicalIF":8.9000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computers and Electronics in Agriculture","FirstCategoryId":"97","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0168169924009268","RegionNum":1,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/13 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AGRICULTURE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
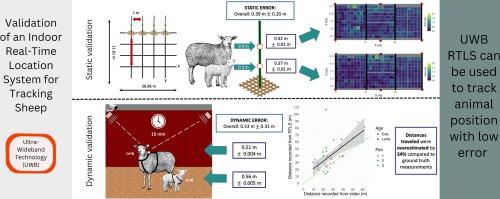
Precision livestock technologies such as remote sensors are increasingly used to monitor the health, behavior, and welfare of livestock. We aimed to evaluate the performance of a commercially available ultra-wideband real-time location system (UWB RTLS) for tracking the 2D spatial locations and distances traveled by meat-breed ewes and lambs in an indoor barn. First, we assessed static performance by attaching the sensors to stationary posts and arranging them in a 1 × 1 m grid throughout the barn (29.0 × 11.8 m) for a total of 285 locations. At each post location, the sensors were placed at approximate ewe (0.9 m) and lamb (0.3 m) wither height. The precise 2D locations of each post were recorded using a laser tape measurer and used as the ground truth for comparison to the RTLS’ recorded x and y coordinates. Secondly, we conducted a dynamic validation test to evaluate the positional error and percent error of distances traveled while the sensors were worn by six free-roaming ewes and their singleton lambs. The ground truth locations of each sheep were recorded from video frames every second over 15 min and compared to the RTLS data. Overall static and dynamic error was 0.39 ± 0.20 m (mean ± SD) and 0.53 ± 0.31 m, respectively. Static error was lower in sensors positioned at lamb height than at ewe height, but the opposite pattern was true for dynamic error. Error was higher in pens further from the master anchor. Ground truth and RTLS distances traveled were positively correlated but the RTLS overestimated distances by 54 % on average. In conclusion, the UWB RTLS can acquire precise location estimates that are suitable for a range of scientific and practical applications, but distance estimates should be adjusted to account for overestimation.
期刊介绍:
Computers and Electronics in Agriculture provides international coverage of advancements in computer hardware, software, electronic instrumentation, and control systems applied to agricultural challenges. Encompassing agronomy, horticulture, forestry, aquaculture, and animal farming, the journal publishes original papers, reviews, and applications notes. It explores the use of computers and electronics in plant or animal agricultural production, covering topics like agricultural soils, water, pests, controlled environments, and waste. The scope extends to on-farm post-harvest operations and relevant technologies, including artificial intelligence, sensors, machine vision, robotics, networking, and simulation modeling. Its companion journal, Smart Agricultural Technology, continues the focus on smart applications in production agriculture.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
