{"title":"Variational resolution probability maps for multi-UAV search tasks with changeable searching behaviors","authors":"Daifeng Zhang , Haibin Duan","doi":"10.1016/j.ast.2024.109669","DOIUrl":null,"url":null,"abstract":"<div><div>Cooperative search is a fundamental task in the autonomous control of multiple unmanned aerial vehicles (UAV) and much effort has been spent on finding an effective way to improve the global search performances. Two behavioral aspects are essentially considered during the multi-UAV cooperative search. One is the coverage (exploration) and the other is the retrospect to hotspot regions (exploitation). Most existing studies focus on the solutions to the former issue, by using the cognitive maps with fixed grid layouts, while ignoring the coexistence of both sides, which potentially induces the failures of finding hidden and indetectable targets. This paper presents a novel search method based on the cognitive maps with alternative grid settings, namely the variational resolution probability map (VRPM), to support the global searches with changeable phases and behaviors. To realize the transformations between different resolution maps in a given budget, the incremental learning is used to update the VRPM under limited number of samples. Potential games with different objectives are used to model the multi-UAV searching behaviors during explorations and exploitations. Lyapunov vector field (LVF) is then used to steer the UAVs toward their target grids in a given time horizon, so that the control period can be properly coincided with the temporal sequences of decision makings. Simulation results demonstrate the phase transitions from the explorations to the exploitations by the proposed method. Search accuracy and the retrospects to hotspot areas are also improved by comparison with the existing search strategies.</div></div>","PeriodicalId":50955,"journal":{"name":"Aerospace Science and Technology","volume":"155 ","pages":"Article 109669"},"PeriodicalIF":5.8000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Aerospace Science and Technology","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1270963824007983","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/16 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, AEROSPACE","Score":null,"Total":0}
引用次数: 0
Abstract
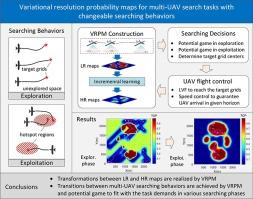
Cooperative search is a fundamental task in the autonomous control of multiple unmanned aerial vehicles (UAV) and much effort has been spent on finding an effective way to improve the global search performances. Two behavioral aspects are essentially considered during the multi-UAV cooperative search. One is the coverage (exploration) and the other is the retrospect to hotspot regions (exploitation). Most existing studies focus on the solutions to the former issue, by using the cognitive maps with fixed grid layouts, while ignoring the coexistence of both sides, which potentially induces the failures of finding hidden and indetectable targets. This paper presents a novel search method based on the cognitive maps with alternative grid settings, namely the variational resolution probability map (VRPM), to support the global searches with changeable phases and behaviors. To realize the transformations between different resolution maps in a given budget, the incremental learning is used to update the VRPM under limited number of samples. Potential games with different objectives are used to model the multi-UAV searching behaviors during explorations and exploitations. Lyapunov vector field (LVF) is then used to steer the UAVs toward their target grids in a given time horizon, so that the control period can be properly coincided with the temporal sequences of decision makings. Simulation results demonstrate the phase transitions from the explorations to the exploitations by the proposed method. Search accuracy and the retrospects to hotspot areas are also improved by comparison with the existing search strategies.
期刊介绍:
Aerospace Science and Technology publishes articles of outstanding scientific quality. Each article is reviewed by two referees. The journal welcomes papers from a wide range of countries. This journal publishes original papers, review articles and short communications related to all fields of aerospace research, fundamental and applied, potential applications of which are clearly related to:
• The design and the manufacture of aircraft, helicopters, missiles, launchers and satellites
• The control of their environment
• The study of various systems they are involved in, as supports or as targets.
Authors are invited to submit papers on new advances in the following topics to aerospace applications:
• Fluid dynamics
• Energetics and propulsion
• Materials and structures
• Flight mechanics
• Navigation, guidance and control
• Acoustics
• Optics
• Electromagnetism and radar
• Signal and image processing
• Information processing
• Data fusion
• Decision aid
• Human behaviour
• Robotics and intelligent systems
• Complex system engineering.
Etc.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
