{"title":"A platform-agnostic deep reinforcement learning framework for effective Sim2Real transfer towards autonomous driving","authors":"Dianzhao Li, Ostap Okhrin","doi":"10.1038/s44172-024-00292-3","DOIUrl":null,"url":null,"abstract":"Autonomous driving presents unique challenges, particularly in transferring agents trained in simulation to real-world environments due to the discrepancies between the two. To address this issue, here we propose a robust Deep Reinforcement Learning (DRL) framework that incorporates platform-dependent perception modules to extract task-relevant information, enabling the training of a lane-following and overtaking agent in simulation. This framework facilitates the efficient transfer of the DRL agent to new simulated environments and the real world with minimal adjustments. We assess the performance of the agent across various driving scenarios in both simulation and the real world, comparing it to human drivers and a proportional-integral-derivative (PID) baseline in simulation. Additionally, we contrast it with other DRL baselines to clarify the rationale behind choosing this framework. Our proposed approach helps bridge the gaps between different platforms and the Simulation to Reality (Sim2Real) gap, allowing the trained agent to perform consistently in both simulation and real-world scenarios, effectively driving the vehicle. Dianzhao Li and Ostap Okhrin proposed a deep reinforcement learning framework for transition between various simulated and real-world driving environments. Their method allows for the more effective control of autonomous vehicles in lane following and overtaking tasks.","PeriodicalId":72644,"journal":{"name":"Communications engineering","volume":" ","pages":"1-14"},"PeriodicalIF":0.0000,"publicationDate":"2024-10-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s44172-024-00292-3.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Communications engineering","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44172-024-00292-3","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
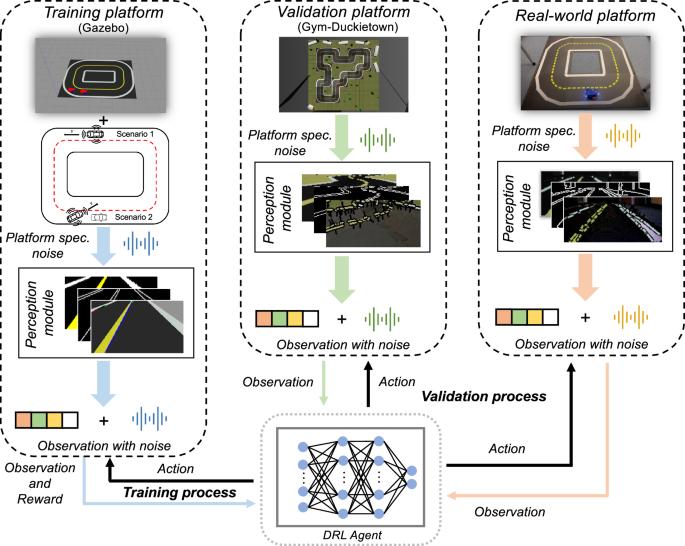
Autonomous driving presents unique challenges, particularly in transferring agents trained in simulation to real-world environments due to the discrepancies between the two. To address this issue, here we propose a robust Deep Reinforcement Learning (DRL) framework that incorporates platform-dependent perception modules to extract task-relevant information, enabling the training of a lane-following and overtaking agent in simulation. This framework facilitates the efficient transfer of the DRL agent to new simulated environments and the real world with minimal adjustments. We assess the performance of the agent across various driving scenarios in both simulation and the real world, comparing it to human drivers and a proportional-integral-derivative (PID) baseline in simulation. Additionally, we contrast it with other DRL baselines to clarify the rationale behind choosing this framework. Our proposed approach helps bridge the gaps between different platforms and the Simulation to Reality (Sim2Real) gap, allowing the trained agent to perform consistently in both simulation and real-world scenarios, effectively driving the vehicle. Dianzhao Li and Ostap Okhrin proposed a deep reinforcement learning framework for transition between various simulated and real-world driving environments. Their method allows for the more effective control of autonomous vehicles in lane following and overtaking tasks.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
