{"title":"Evaluation of microplate handling accuracy for applying robotic arms in laboratory automation","authors":"Yoritaka Harazono , Haruko Shimono , Kikumi Hata , Toutai Mitsuyama , Takaaki Horinouchi","doi":"10.1016/j.slast.2024.100200","DOIUrl":null,"url":null,"abstract":"<div><div>An inexpensive single-arm robot is widely utilized for recent laboratory automation solutions. The integration of a single-arm robot as a transfer system into a semi-automatic liquid dispenser without a transfer system can be realized as an inexpensive alternative to a fully automated liquid handling system. However, there has been no quantitative investigation of the positional accuracy of robot arms required to transfer microplates. In this study, we constructed a platform comprising aluminum frames and digital gauges to facilitate such measurements. We measured the position repeatability of a robot arm equipped with a custom-made finger by repeatedly transferring microplates. Further, the acceptable misalignment of plate transfer was evaluated by adding an artificial offset to the microplate position using this platform. The results of these experiments are expected to serve as benchmarks for the selection of robot arms for laboratory automation in biology. Furthermore, all information for replicating this device will be made publicly available, thereby allowing many researchers to collaborate and accumulate knowledge, hopefully contributing to advances in this field.</div></div>","PeriodicalId":54248,"journal":{"name":"SLAS Technology","volume":"29 6","pages":"Article 100200"},"PeriodicalIF":3.7000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"SLAS Technology","FirstCategoryId":"3","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2472630324000827","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/11 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"BIOCHEMICAL RESEARCH METHODS","Score":null,"Total":0}
引用次数: 0
Abstract
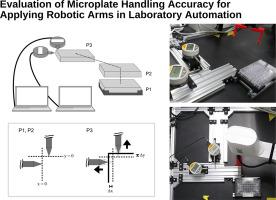
An inexpensive single-arm robot is widely utilized for recent laboratory automation solutions. The integration of a single-arm robot as a transfer system into a semi-automatic liquid dispenser without a transfer system can be realized as an inexpensive alternative to a fully automated liquid handling system. However, there has been no quantitative investigation of the positional accuracy of robot arms required to transfer microplates. In this study, we constructed a platform comprising aluminum frames and digital gauges to facilitate such measurements. We measured the position repeatability of a robot arm equipped with a custom-made finger by repeatedly transferring microplates. Further, the acceptable misalignment of plate transfer was evaluated by adding an artificial offset to the microplate position using this platform. The results of these experiments are expected to serve as benchmarks for the selection of robot arms for laboratory automation in biology. Furthermore, all information for replicating this device will be made publicly available, thereby allowing many researchers to collaborate and accumulate knowledge, hopefully contributing to advances in this field.
期刊介绍:
SLAS Technology emphasizes scientific and technical advances that enable and improve life sciences research and development; drug-delivery; diagnostics; biomedical and molecular imaging; and personalized and precision medicine. This includes high-throughput and other laboratory automation technologies; micro/nanotechnologies; analytical, separation and quantitative techniques; synthetic chemistry and biology; informatics (data analysis, statistics, bio, genomic and chemoinformatics); and more.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
