Sergio Vélez , Gonzalo Mier , Mar Ariza-Sentís , João Valente
{"title":"Integrated framework for multipurpose UAV Path Planning in hedgerow systems considering the biophysical environment","authors":"Sergio Vélez , Gonzalo Mier , Mar Ariza-Sentís , João Valente","doi":"10.1016/j.cropro.2024.106992","DOIUrl":null,"url":null,"abstract":"<div><div>This study presents a new path-planning framework for precision agriculture, designed for hedgerow systems, which combines cutting-edge technology and data analysis to enhance crop management in light of climate change challenges. The framework creates detailed digital field models by employing Unmanned Aerial Vehicles (UAVs), or drones, either with high-precision LiDAR or Structure-from-Motion (SfM) data. Then, these models are inputs for the path planning algorithm, crucial for directing drones on the most efficient paths for surveys or spraying. The key feature is its ability to adjust to the specific conditions of agricultural fields, considering the current biophysical environment, ensuring paths are closely aligned with crop rows and adapting to vegetation changes. This leads to significant efficiency improvements, especially in cases of irregular row spacing or heterogeneous vegetation, achieving paths up to 40% shorter than traditional geometry-based methods. The effectiveness of the algorithm relies on the quality of input data, with LiDAR being recommended due to its higher accuracy despite its longer processing time. Field tests were conducted in a vineyard in Spain to validate the effectiveness of the framework. Integrating drone technology with precise routing and high-quality data, the proposed framework can potentially enhance the sustainable and efficient management of woody crops.</div></div>","PeriodicalId":10785,"journal":{"name":"Crop Protection","volume":"187 ","pages":"Article 106992"},"PeriodicalIF":2.5000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Crop Protection","FirstCategoryId":"97","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0261219424004204","RegionNum":2,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/19 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AGRONOMY","Score":null,"Total":0}
引用次数: 0
Abstract
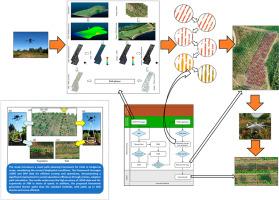
This study presents a new path-planning framework for precision agriculture, designed for hedgerow systems, which combines cutting-edge technology and data analysis to enhance crop management in light of climate change challenges. The framework creates detailed digital field models by employing Unmanned Aerial Vehicles (UAVs), or drones, either with high-precision LiDAR or Structure-from-Motion (SfM) data. Then, these models are inputs for the path planning algorithm, crucial for directing drones on the most efficient paths for surveys or spraying. The key feature is its ability to adjust to the specific conditions of agricultural fields, considering the current biophysical environment, ensuring paths are closely aligned with crop rows and adapting to vegetation changes. This leads to significant efficiency improvements, especially in cases of irregular row spacing or heterogeneous vegetation, achieving paths up to 40% shorter than traditional geometry-based methods. The effectiveness of the algorithm relies on the quality of input data, with LiDAR being recommended due to its higher accuracy despite its longer processing time. Field tests were conducted in a vineyard in Spain to validate the effectiveness of the framework. Integrating drone technology with precise routing and high-quality data, the proposed framework can potentially enhance the sustainable and efficient management of woody crops.
期刊介绍:
The Editors of Crop Protection especially welcome papers describing an interdisciplinary approach showing how different control strategies can be integrated into practical pest management programs, covering high and low input agricultural systems worldwide. Crop Protection particularly emphasizes the practical aspects of control in the field and for protected crops, and includes work which may lead in the near future to more effective control. The journal does not duplicate the many existing excellent biological science journals, which deal mainly with the more fundamental aspects of plant pathology, applied zoology and weed science. Crop Protection covers all practical aspects of pest, disease and weed control, including the following topics:
-Abiotic damage-
Agronomic control methods-
Assessment of pest and disease damage-
Molecular methods for the detection and assessment of pests and diseases-
Biological control-
Biorational pesticides-
Control of animal pests of world crops-
Control of diseases of crop plants caused by microorganisms-
Control of weeds and integrated management-
Economic considerations-
Effects of plant growth regulators-
Environmental benefits of reduced pesticide use-
Environmental effects of pesticides-
Epidemiology of pests and diseases in relation to control-
GM Crops, and genetic engineering applications-
Importance and control of postharvest crop losses-
Integrated control-
Interrelationships and compatibility among different control strategies-
Invasive species as they relate to implications for crop protection-
Pesticide application methods-
Pest management-
Phytobiomes for pest and disease control-
Resistance management-
Sampling and monitoring schemes for diseases, nematodes, pests and weeds.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
