Jie Liu , Zufeng Pang , Zhiyong Li , Guilin Wen , Zhoucheng Su , Junfeng He , Kaiyue Liu , Dezheng Jiang , Zenan Li , Shouyan Chen , Yang Tian , Yi Min Xie , Zhenpei Wang , Zhuangjian Liu
{"title":"An origami-wheeled robot with variable width and enhanced sand walking versatility","authors":"Jie Liu , Zufeng Pang , Zhiyong Li , Guilin Wen , Zhoucheng Su , Junfeng He , Kaiyue Liu , Dezheng Jiang , Zenan Li , Shouyan Chen , Yang Tian , Yi Min Xie , Zhenpei Wang , Zhuangjian Liu","doi":"10.1016/j.tws.2024.112645","DOIUrl":null,"url":null,"abstract":"<div><div>Robots inspired by origami that offer several benefits, including being lightweight, requiring less assembly, and possessing remarkable deformability, have drawn a lot of interest. However, the existing origami-inspired robots are usually of limited functionalities and developing feature-rich robots is very challenging. Here, we report an origami-wheeled robot (OriWheelBot) with exceptional mobility for sand walking and a changing width. Origami wheels created using Miura origami permit the OriWheelBot to alter wheel width over obstacles. We derive the variable-width and diameter analytical models of the origami wheel, assuming rigid-folding, which has been confirmed by testing. An enhanced variant, dubbed iOriWheelBot, is additionally being developed to autonomously determine the obstacle's breadth. Based on the width of the channel between the barriers, three actions will be executed: direct pass, variable width pass, and direct return. Sand-pushing is more suitable for walking on the sand than sand-digging, which is the other of the two motion mechanisms that we have identified. Many aspects of sand walking, including carrying loads, walking on a slope, climbing a slope, and negotiating sand pits, small rocks, and sand traps, have been methodically investigated. The OriWheelBot can climb a 17-degree sand incline, vary its width by 40 %, and have a loading-carrying ratio of 66.7 % on flat sand. Rescue operations in disaster areas and planetary subsurface exploration can benefit from the OriWheelBot.</div></div>","PeriodicalId":49435,"journal":{"name":"Thin-Walled Structures","volume":"206 ","pages":"Article 112645"},"PeriodicalIF":6.6000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Thin-Walled Structures","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0263823124010851","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/2 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, CIVIL","Score":null,"Total":0}
引用次数: 0
Abstract
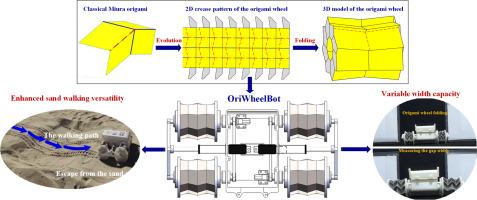
Robots inspired by origami that offer several benefits, including being lightweight, requiring less assembly, and possessing remarkable deformability, have drawn a lot of interest. However, the existing origami-inspired robots are usually of limited functionalities and developing feature-rich robots is very challenging. Here, we report an origami-wheeled robot (OriWheelBot) with exceptional mobility for sand walking and a changing width. Origami wheels created using Miura origami permit the OriWheelBot to alter wheel width over obstacles. We derive the variable-width and diameter analytical models of the origami wheel, assuming rigid-folding, which has been confirmed by testing. An enhanced variant, dubbed iOriWheelBot, is additionally being developed to autonomously determine the obstacle's breadth. Based on the width of the channel between the barriers, three actions will be executed: direct pass, variable width pass, and direct return. Sand-pushing is more suitable for walking on the sand than sand-digging, which is the other of the two motion mechanisms that we have identified. Many aspects of sand walking, including carrying loads, walking on a slope, climbing a slope, and negotiating sand pits, small rocks, and sand traps, have been methodically investigated. The OriWheelBot can climb a 17-degree sand incline, vary its width by 40 %, and have a loading-carrying ratio of 66.7 % on flat sand. Rescue operations in disaster areas and planetary subsurface exploration can benefit from the OriWheelBot.
期刊介绍:
Thin-walled structures comprises an important and growing proportion of engineering construction with areas of application becoming increasingly diverse, ranging from aircraft, bridges, ships and oil rigs to storage vessels, industrial buildings and warehouses.
Many factors, including cost and weight economy, new materials and processes and the growth of powerful methods of analysis have contributed to this growth, and led to the need for a journal which concentrates specifically on structures in which problems arise due to the thinness of the walls. This field includes cold– formed sections, plate and shell structures, reinforced plastics structures and aluminium structures, and is of importance in many branches of engineering.
The primary criterion for consideration of papers in Thin–Walled Structures is that they must be concerned with thin–walled structures or the basic problems inherent in thin–walled structures. Provided this criterion is satisfied no restriction is placed on the type of construction, material or field of application. Papers on theory, experiment, design, etc., are published and it is expected that many papers will contain aspects of all three.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
