{"title":"2D Ti3C2Tx MXene-based light-driven actuator with integrated structure for self-powered multi-modal intelligent perception assisted by neural network","authors":"Jiahao Zhou , Huamin Chen , Zhihao Wu , Peidi Zhou , Minghua You , Chan Zheng , Qiaohang Guo , Zhou Li , Mingcen Weng","doi":"10.1016/j.nanoen.2024.110552","DOIUrl":null,"url":null,"abstract":"<div><div>Conventional Ti<sub>3</sub>C<sub>2</sub>T<sub>x</sub> MXene-based actuators, due to their lack of human-like self-perception capability, have hindered soft robots from progressing toward intelligent robot-environment interactions. Strategies to reconcile environmental stimulus-response actuation and self-powered multi-modal intelligent perception remain challenging. Here, we have designed a flexible actuator with a P-N couple structure. Wherein, the Ti<sub>3</sub>C<sub>2</sub>T<sub>x</sub> MXene-chitin nanofibers (MCHF) composite film prepared by vacuum-assisted self-assembly was utilized as the N-type photothermal layer, and the PEDOT:PSS/PET film was utilized as the P-type thermal-expansion layer. Based on the thermoelectric and electronegative properties of the MCHF composite film, we propose two strategies to combine the light-driven actuation mechanism with the photo-thermoelectric effect (PTE) and triboelectric effect to endow the light-driven actuator perception capabilities. Based on the PTE effect, the MCHF-based bilayer film can be directly utilized as a PTE generator (Seebeck coefficient of 23.3 μV K<sup>−1</sup>) to simultaneously achieve light-driven actuation and self-powered relative-temperature perception. When utilized as a triboelectric electrode (maximum output voltage of 144.7 V), the MCHF layer can trigger the triboelectric effect with the actuation force of the light-driven actuator, thus realizing self-powered material perception. Finally, we demonstrated an intelligent gripper capable of synergizing light-driven actuation and self-powered multi-modal perception by compactly integrating these two strategies, which can recognize susceptible signals accurately (accuracy of 98 %) with the assistance of a neural network. This work is promising to facilitate the intelligent interaction of Ti<sub>3</sub>C<sub>2</sub>T<sub>x</sub> MXene-based soft robots with variable environments.</div></div>","PeriodicalId":394,"journal":{"name":"Nano Energy","volume":"134 ","pages":"Article 110552"},"PeriodicalIF":17.1000,"publicationDate":"2025-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nano Energy","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2211285524013041","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/12/13 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
引用次数: 0
Abstract
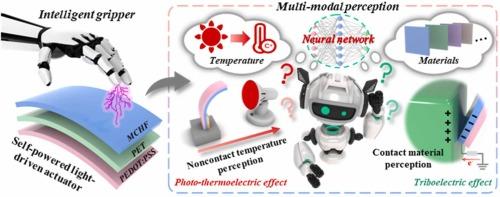
Conventional Ti3C2Tx MXene-based actuators, due to their lack of human-like self-perception capability, have hindered soft robots from progressing toward intelligent robot-environment interactions. Strategies to reconcile environmental stimulus-response actuation and self-powered multi-modal intelligent perception remain challenging. Here, we have designed a flexible actuator with a P-N couple structure. Wherein, the Ti3C2Tx MXene-chitin nanofibers (MCHF) composite film prepared by vacuum-assisted self-assembly was utilized as the N-type photothermal layer, and the PEDOT:PSS/PET film was utilized as the P-type thermal-expansion layer. Based on the thermoelectric and electronegative properties of the MCHF composite film, we propose two strategies to combine the light-driven actuation mechanism with the photo-thermoelectric effect (PTE) and triboelectric effect to endow the light-driven actuator perception capabilities. Based on the PTE effect, the MCHF-based bilayer film can be directly utilized as a PTE generator (Seebeck coefficient of 23.3 μV K−1) to simultaneously achieve light-driven actuation and self-powered relative-temperature perception. When utilized as a triboelectric electrode (maximum output voltage of 144.7 V), the MCHF layer can trigger the triboelectric effect with the actuation force of the light-driven actuator, thus realizing self-powered material perception. Finally, we demonstrated an intelligent gripper capable of synergizing light-driven actuation and self-powered multi-modal perception by compactly integrating these two strategies, which can recognize susceptible signals accurately (accuracy of 98 %) with the assistance of a neural network. This work is promising to facilitate the intelligent interaction of Ti3C2Tx MXene-based soft robots with variable environments.
期刊介绍:
Nano Energy is a multidisciplinary, rapid-publication forum of original peer-reviewed contributions on the science and engineering of nanomaterials and nanodevices used in all forms of energy harvesting, conversion, storage, utilization and policy. Through its mixture of articles, reviews, communications, research news, and information on key developments, Nano Energy provides a comprehensive coverage of this exciting and dynamic field which joins nanoscience and nanotechnology with energy science. The journal is relevant to all those who are interested in nanomaterials solutions to the energy problem.
Nano Energy publishes original experimental and theoretical research on all aspects of energy-related research which utilizes nanomaterials and nanotechnology. Manuscripts of four types are considered: review articles which inform readers of the latest research and advances in energy science; rapid communications which feature exciting research breakthroughs in the field; full-length articles which report comprehensive research developments; and news and opinions which comment on topical issues or express views on the developments in related fields.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
