{"title":"Amphibious Soft Robots Based on Programmable Actuators Fabricated by Brushing Chinese Ink on Paper","authors":"Haoyao Li, Yubo Wang, Zhiling Luo, Jian Lin, Yongqiang Qian, Wei Zhang, Luzhuo Chen","doi":"10.1002/smll.202409307","DOIUrl":null,"url":null,"abstract":"<p>Soft robots based on actuators that can work in both on-ground and on-water situations are environmentally adaptable and can accomplish tasks in complex environments. However, most current amphibious actuators need external stimuli to move on water and require complex preparation processes. Herein, amphibious Ink-paper/polyethylene programmable actuators and robots are proposed, which are fabricated by rapidly brushing Chinese ink on paper. The actuator can bend on the ground and move autonomously on the water. On one hand, the actuator shows a maximum bending curvature of 2.66 cm<sup>−1</sup> under near-infrared light, and the actuation performance can be programmed by ink concentration. Moreover, actuators with pen-brushed information can be shape-programmed for dynamic information display. On the other hand, the actuator can autonomously move on the water by using Chinese ink as Marangoni fuel. The maximum moving velocity is 4.73 cm s<sup>−1</sup>. When the ink is saturated in the water, the actuator can further be driven by an infrared laser. Finally, three soft robots with diverse programmable amphibious motions are designed. Both the crawling/bending motion on the ground and autonomous linear/rotary movement on the water can be programmed by altering actuator structures. This research will provide new inspirations for next-generation amphibious actuators and soft robots.</p>","PeriodicalId":228,"journal":{"name":"Small","volume":"21 7","pages":""},"PeriodicalIF":12.1000,"publicationDate":"2025-01-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Small","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/smll.202409307","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
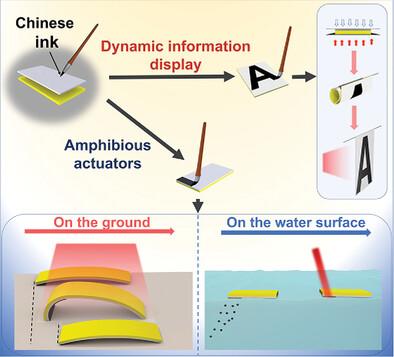
Soft robots based on actuators that can work in both on-ground and on-water situations are environmentally adaptable and can accomplish tasks in complex environments. However, most current amphibious actuators need external stimuli to move on water and require complex preparation processes. Herein, amphibious Ink-paper/polyethylene programmable actuators and robots are proposed, which are fabricated by rapidly brushing Chinese ink on paper. The actuator can bend on the ground and move autonomously on the water. On one hand, the actuator shows a maximum bending curvature of 2.66 cm−1 under near-infrared light, and the actuation performance can be programmed by ink concentration. Moreover, actuators with pen-brushed information can be shape-programmed for dynamic information display. On the other hand, the actuator can autonomously move on the water by using Chinese ink as Marangoni fuel. The maximum moving velocity is 4.73 cm s−1. When the ink is saturated in the water, the actuator can further be driven by an infrared laser. Finally, three soft robots with diverse programmable amphibious motions are designed. Both the crawling/bending motion on the ground and autonomous linear/rotary movement on the water can be programmed by altering actuator structures. This research will provide new inspirations for next-generation amphibious actuators and soft robots.
基于执行器的软机器人可以在地面和水上工作,具有环境适应性,可以在复杂的环境中完成任务。然而,目前大多数两栖执行器需要外部刺激才能在水面上移动,并且需要复杂的准备过程。本文提出了一种水墨纸/聚乙烯可编程执行器和机器人,该执行器是通过在纸上快速涂刷墨水制成的。执行器可以在地面上弯曲,在水面上自主移动。一方面,在近红外光下,驱动器的最大弯曲曲率为2.66 cm−1,并且可以通过墨水浓度来编程驱动性能。此外,具有笔刷信息的执行器可以进行形状编程以实现动态信息显示。另一方面,执行器可以使用中国墨水作为马兰戈尼燃料在水面上自主移动。最大移动速度为4.73 cm s−1。当油墨在水中饱和时,执行器可以进一步由红外激光器驱动。最后,设计了三种具有多种可编程两栖运动的软体机器人。地面上的爬行/弯曲运动和水中的自主线性/旋转运动都可以通过改变执行器结构来编程。该研究将为下一代两栖执行器和软体机器人提供新的灵感。
期刊介绍:
Small serves as an exceptional platform for both experimental and theoretical studies in fundamental and applied interdisciplinary research at the nano- and microscale. The journal offers a compelling mix of peer-reviewed Research Articles, Reviews, Perspectives, and Comments.
With a remarkable 2022 Journal Impact Factor of 13.3 (Journal Citation Reports from Clarivate Analytics, 2023), Small remains among the top multidisciplinary journals, covering a wide range of topics at the interface of materials science, chemistry, physics, engineering, medicine, and biology.
Small's readership includes biochemists, biologists, biomedical scientists, chemists, engineers, information technologists, materials scientists, physicists, and theoreticians alike.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
