Helene Ackermann, Anja Henke, Johann Chevalère, Hae Seon Yun, Verena V Hafner, Niels Pinkwart, Rebecca Lazarides
{"title":"Physical embodiment and anthropomorphism of AI tutors and their role in student enjoyment and performance.","authors":"Helene Ackermann, Anja Henke, Johann Chevalère, Hae Seon Yun, Verena V Hafner, Niels Pinkwart, Rebecca Lazarides","doi":"10.1038/s41539-024-00293-z","DOIUrl":null,"url":null,"abstract":"<p><p>Rising interest in artificial intelligence in education reinforces the demand for evidence-based implementation. This study investigates how tutor agents' physical embodiment and anthropomorphism (student-reported sociability, animacy, agency, and disturbance) relate to affective (on-task enjoyment) and cognitive (task performance) learning within an intelligent tutoring system (ITS). Data from 56 students (M = 17.75 years, SD = 2.63 years; 30.4% female), working with an emotionally-adaptive version of the ITS \"Betty's Brain\", were analyzed. The ITS' agents were either depicted as on-screen robots (condition A) or as both on-screen avatars and physical robots (condition B). Physical presence of the tutor agent was not significantly related to task performance or anthropomorphism, but to higher initial on-task enjoyment. Student-reported disturbance was negatively related to initial on-task enjoyment, and student-reported sociability was negatively related to task performance. While physical robots may increase initial on-task enjoyment, students' perception of certain characteristics may hinder learning, providing implications for designing social robots for education.</p>","PeriodicalId":48503,"journal":{"name":"npj Science of Learning","volume":"10 1","pages":"1"},"PeriodicalIF":3.0000,"publicationDate":"2025-01-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11711547/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"npj Science of Learning","FirstCategoryId":"102","ListUrlMain":"https://doi.org/10.1038/s41539-024-00293-z","RegionNum":1,"RegionCategory":"心理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"EDUCATION & EDUCATIONAL RESEARCH","Score":null,"Total":0}
引用次数: 0
Abstract
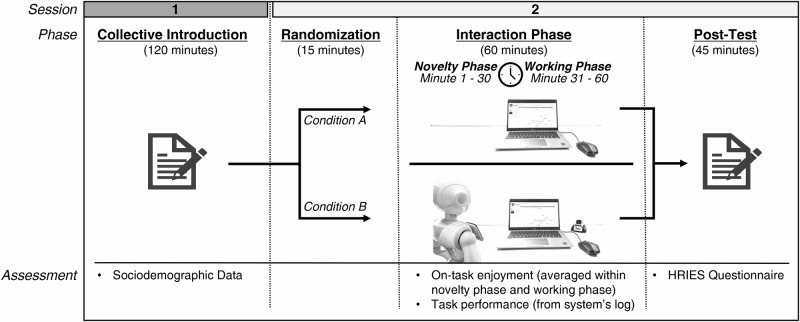
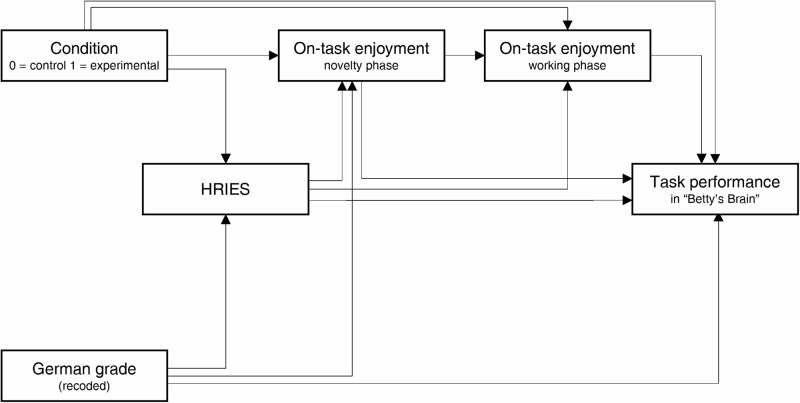
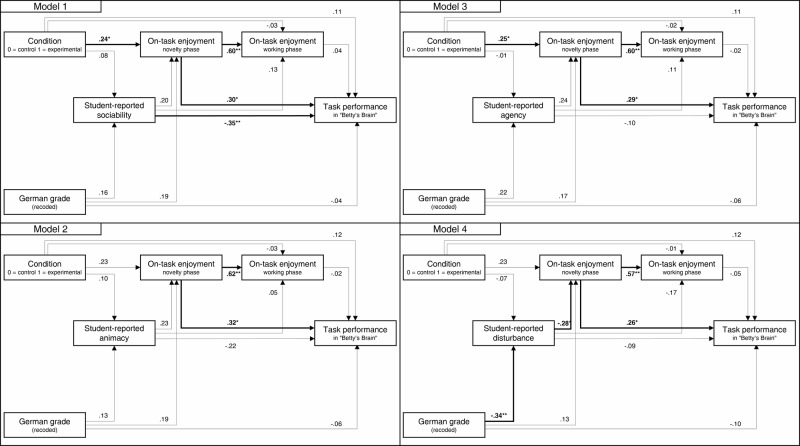
Rising interest in artificial intelligence in education reinforces the demand for evidence-based implementation. This study investigates how tutor agents' physical embodiment and anthropomorphism (student-reported sociability, animacy, agency, and disturbance) relate to affective (on-task enjoyment) and cognitive (task performance) learning within an intelligent tutoring system (ITS). Data from 56 students (M = 17.75 years, SD = 2.63 years; 30.4% female), working with an emotionally-adaptive version of the ITS "Betty's Brain", were analyzed. The ITS' agents were either depicted as on-screen robots (condition A) or as both on-screen avatars and physical robots (condition B). Physical presence of the tutor agent was not significantly related to task performance or anthropomorphism, but to higher initial on-task enjoyment. Student-reported disturbance was negatively related to initial on-task enjoyment, and student-reported sociability was negatively related to task performance. While physical robots may increase initial on-task enjoyment, students' perception of certain characteristics may hinder learning, providing implications for designing social robots for education.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
