Jie Shen (沈杰) , Yun Wang (王芸) , Min Yao (姚敏) , Shubo Liu (刘书博) , Zhiguang Guo (郭志光) , Li Zhang (张立) , Ben Wang (王奔)
{"title":"Long-span delivery of differentiable hybrid robots for restoration of neural connections","authors":"Jie Shen (沈杰) , Yun Wang (王芸) , Min Yao (姚敏) , Shubo Liu (刘书博) , Zhiguang Guo (郭志光) , Li Zhang (张立) , Ben Wang (王奔)","doi":"10.1016/j.matt.2024.101942","DOIUrl":null,"url":null,"abstract":"<div><div>Lumbar puncture is a minimally invasive technique for delivering drugs into cerebrospinal fluid (CSF). However, its effectiveness is limited by the spine’s extensive length and the narrow, complex CSF spaces, which hinder efficient passive diffusion of therapeutic agents. Here, we have engineered a differentiable stem cell-assembled soft robot (SCASR) by using a three-dimensional self-assembly process in liquid marbles. These biologically viable robots can interface with the tissues inside the CSF, adapting to the complex surroundings while navigating. With X-ray imaging and magnetic actuation, the SCASRs can be guided toward targeted regions. The SCASRs autonomously disassemble into individual cells, which then differentiate into neural cells to facilitate the restoration of neural connections, thereby aiding the recovery of paralyzed lower limbs. The proposed strategy provides an imaging-based therapeutic system for nerve injury, enabling accessibility of hard-to-reach spinal regions and facilitating efficient therapy in minimally invasive manner, by means of soft microrobots.</div></div>","PeriodicalId":388,"journal":{"name":"Matter","volume":"8 3","pages":"Article 101942"},"PeriodicalIF":17.5000,"publicationDate":"2025-03-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Matter","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2590238524006350","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/13 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
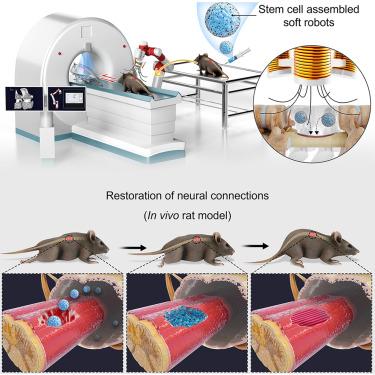
Lumbar puncture is a minimally invasive technique for delivering drugs into cerebrospinal fluid (CSF). However, its effectiveness is limited by the spine’s extensive length and the narrow, complex CSF spaces, which hinder efficient passive diffusion of therapeutic agents. Here, we have engineered a differentiable stem cell-assembled soft robot (SCASR) by using a three-dimensional self-assembly process in liquid marbles. These biologically viable robots can interface with the tissues inside the CSF, adapting to the complex surroundings while navigating. With X-ray imaging and magnetic actuation, the SCASRs can be guided toward targeted regions. The SCASRs autonomously disassemble into individual cells, which then differentiate into neural cells to facilitate the restoration of neural connections, thereby aiding the recovery of paralyzed lower limbs. The proposed strategy provides an imaging-based therapeutic system for nerve injury, enabling accessibility of hard-to-reach spinal regions and facilitating efficient therapy in minimally invasive manner, by means of soft microrobots.
期刊介绍:
Matter, a monthly journal affiliated with Cell, spans the broad field of materials science from nano to macro levels,covering fundamentals to applications. Embracing groundbreaking technologies,it includes full-length research articles,reviews, perspectives,previews, opinions, personnel stories, and general editorial content.
Matter aims to be the primary resource for researchers in academia and industry, inspiring the next generation of materials scientists.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
