{"title":"Long, Fibrous, and Tailorable Dielectric Elastomer Artificial Muscles via Mask-Free Stamping of Carbon Nanotube Electrodes","authors":"Qi Shao, Liang Zhou, Jingyi Zhou, Xin-Jun Liu, Huichan Zhao","doi":"10.1002/adfm.202422905","DOIUrl":null,"url":null,"abstract":"<p>High-performance, large-size artificial muscles are in great demand in the field of robotics. This work reports a comprehensive approach for fabricating, actuating, sensing, and controlling a 180 mm-long fibrous dielectric elastomer (DE) artificial muscle. The fabrication process introduces a novel method for patterning large-area, uniform electrodes using vacuum filtration followed by mask-free stamping on DE substrates. To address the challenge of long charging times that impair dynamic performance, an amplitude modulation algorithm is developed for high-frequency actuation, which increased generated strain by 64% at a resonant frequency of 10 Hz. Additionally, the hollow space within the rolled artificial muscle is used to integrate a waveguide that serves as a strain sensor. This combined actuation-sensing structure maintains flexibility and actuation capabilities while enabling self-sensing and feedback control. The versatility of the DE artificial muscle is further demonstrated by segmenting a single long muscle into three shorter units and employing these units to construct two multi-actuator machines: a tensegrity-based gimbal and a rotary engine. This work advances the large-scale production and application of DE artificial muscles.</p>","PeriodicalId":112,"journal":{"name":"Advanced Functional Materials","volume":"35 17","pages":""},"PeriodicalIF":19.0000,"publicationDate":"2025-01-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Functional Materials","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adfm.202422905","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
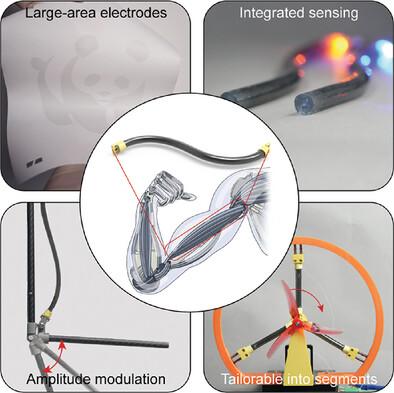
High-performance, large-size artificial muscles are in great demand in the field of robotics. This work reports a comprehensive approach for fabricating, actuating, sensing, and controlling a 180 mm-long fibrous dielectric elastomer (DE) artificial muscle. The fabrication process introduces a novel method for patterning large-area, uniform electrodes using vacuum filtration followed by mask-free stamping on DE substrates. To address the challenge of long charging times that impair dynamic performance, an amplitude modulation algorithm is developed for high-frequency actuation, which increased generated strain by 64% at a resonant frequency of 10 Hz. Additionally, the hollow space within the rolled artificial muscle is used to integrate a waveguide that serves as a strain sensor. This combined actuation-sensing structure maintains flexibility and actuation capabilities while enabling self-sensing and feedback control. The versatility of the DE artificial muscle is further demonstrated by segmenting a single long muscle into three shorter units and employing these units to construct two multi-actuator machines: a tensegrity-based gimbal and a rotary engine. This work advances the large-scale production and application of DE artificial muscles.
期刊介绍:
Firmly established as a top-tier materials science journal, Advanced Functional Materials reports breakthrough research in all aspects of materials science, including nanotechnology, chemistry, physics, and biology every week.
Advanced Functional Materials is known for its rapid and fair peer review, quality content, and high impact, making it the first choice of the international materials science community.






 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
