{"title":"Monolithic electrostatic actuators with independent stiffness modulation","authors":"Yuejun Xu, Jian Wen, Etienne Burdet, Majid Taghavi","doi":"10.1038/s41467-025-56455-z","DOIUrl":null,"url":null,"abstract":"<p>Robotic artificial muscles, inspired by the adaptability of biological muscles, outperform rigid robots in dynamic environments due to their flexibility. However, the intrinsic compliance of the soft actuators restricts force transmission capacity and dynamic response. Biological muscle modulates their stiffness and damping, varying viscoelastic properties and force in interaction with the surroundings. Here we replicate this function in the electro-stiffened ribbon actuator, a monolithic strong actuator capable of high contraction and stiffness modulation. electro-stiffened ribbon actuator employs dielectric-liquid-amplified electrostatic forces for contraction, and electrorheological fluid for rapid (<10 ms) stiffness and damping adjustments. This seamless integration enables contractile force modulation, extending its capability as a lightweight variable resistance passive spring by over 2.5 times, and improves its dynamic responses, with faster contractions and rapid attenuation of oscillations by more than 50%. We demonstrate electro-stiffened ribbon actuator’s versatility in active, passive and dual connection functions, including arm-bending wearable robotics, robotic arms with variable impact resistance and muscle-like stiffness and damping modulation.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"45 1","pages":""},"PeriodicalIF":14.7000,"publicationDate":"2025-01-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-025-56455-z","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
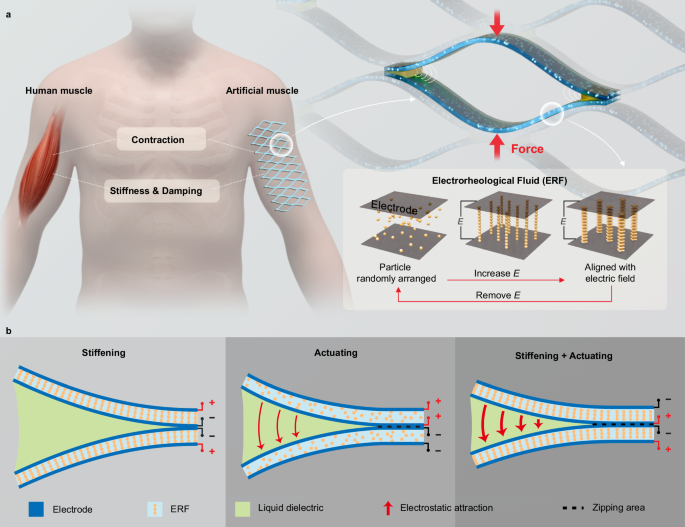
Robotic artificial muscles, inspired by the adaptability of biological muscles, outperform rigid robots in dynamic environments due to their flexibility. However, the intrinsic compliance of the soft actuators restricts force transmission capacity and dynamic response. Biological muscle modulates their stiffness and damping, varying viscoelastic properties and force in interaction with the surroundings. Here we replicate this function in the electro-stiffened ribbon actuator, a monolithic strong actuator capable of high contraction and stiffness modulation. electro-stiffened ribbon actuator employs dielectric-liquid-amplified electrostatic forces for contraction, and electrorheological fluid for rapid (<10 ms) stiffness and damping adjustments. This seamless integration enables contractile force modulation, extending its capability as a lightweight variable resistance passive spring by over 2.5 times, and improves its dynamic responses, with faster contractions and rapid attenuation of oscillations by more than 50%. We demonstrate electro-stiffened ribbon actuator’s versatility in active, passive and dual connection functions, including arm-bending wearable robotics, robotic arms with variable impact resistance and muscle-like stiffness and damping modulation.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
