{"title":"Teaching robots to build simulations of themselves","authors":"Yuhang Hu, Jiong Lin, Hod Lipson","doi":"10.1038/s42256-025-01006-w","DOIUrl":null,"url":null,"abstract":"The emergence of vision catalysed a pivotal evolutionary advancement, enabling organisms not only to perceive but also to interact intelligently with their environment. This transformation is mirrored by the evolution of robotic systems, where the ability to leverage vision to simulate and predict their own dynamics marks a leap towards autonomy and self-awareness. Humans utilize vision to record experiences and internally simulate potential actions. For example, we can imagine that, if we stand up and raise our arms, the body will form a ‘T’ shape without physical movement. Similarly, simulation allows robots to plan and predict the outcomes of potential actions without execution. Here we introduce a self-supervised learning framework to enable robots to model and predict their morphology, kinematics and motor control using only brief raw video data, eliminating the need for extensive real-world data collection and kinematic priors. By observing their own movements, akin to humans watching their reflection in a mirror, robots learn an ability to simulate themselves and predict their spatial motion for various tasks. Our results demonstrate that this self-learned simulation not only enables accurate motion planning but also allows the robot to detect abnormalities and recover from damage. Motion planning for a robot generally requires full knowledge of its structure. Here Hu and colleagues present a method for inferring the structure of a robot from visual information.","PeriodicalId":48533,"journal":{"name":"Nature Machine Intelligence","volume":"7 3","pages":"484-494"},"PeriodicalIF":23.9000,"publicationDate":"2025-02-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Machine Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.nature.com/articles/s42256-025-01006-w","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
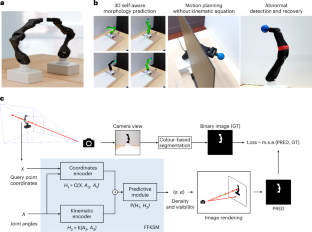
The emergence of vision catalysed a pivotal evolutionary advancement, enabling organisms not only to perceive but also to interact intelligently with their environment. This transformation is mirrored by the evolution of robotic systems, where the ability to leverage vision to simulate and predict their own dynamics marks a leap towards autonomy and self-awareness. Humans utilize vision to record experiences and internally simulate potential actions. For example, we can imagine that, if we stand up and raise our arms, the body will form a ‘T’ shape without physical movement. Similarly, simulation allows robots to plan and predict the outcomes of potential actions without execution. Here we introduce a self-supervised learning framework to enable robots to model and predict their morphology, kinematics and motor control using only brief raw video data, eliminating the need for extensive real-world data collection and kinematic priors. By observing their own movements, akin to humans watching their reflection in a mirror, robots learn an ability to simulate themselves and predict their spatial motion for various tasks. Our results demonstrate that this self-learned simulation not only enables accurate motion planning but also allows the robot to detect abnormalities and recover from damage. Motion planning for a robot generally requires full knowledge of its structure. Here Hu and colleagues present a method for inferring the structure of a robot from visual information.
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
