{"title":"Enhanced consensus control architecture for autonomous platoon utilizing multi-agent reinforcement learning","authors":"Xin Guo, Jiankun Peng, Dawei Pi, Hailong Zhang, Changcheng Wu, Chunye Ma","doi":"10.1111/mice.13463","DOIUrl":null,"url":null,"abstract":"<p>Coordinating a platoon of connected and automated vehicles significantly improves traffic efficiency and safety. Current platoon control methods prioritize consistency and convergence performance but overlook the inherent interdependence between the platoon and the the non-connected leading vehicle. This oversight constrains the platoon's adaptability in car-following scenarios, resulting in suboptimal optimization performance. To address this issue, this paper proposed a platoon control framework based on multi-agent reinforcement learning, aiming to integrate cooperative optimization with platoon tracking behavior and internal coordination strategies. This strategy employs a bidirectional cooperative optimization mechanism to effectively decouple the platoon's tracking behavior from its internal coordination control, and then recouple it in a multi-objective optimized manner. Additionally, it leverages long short-term memory networks to accurately capture and manage the platoon's dynamic nature over time, aiming to achieve enhanced optimization outcomes. The simulation results demonstrate that the proposed method effectively improves the platoon's cooperative effect and car-following adaptability. Compared to the consensus control strategy, it reduces the average spacing error by 8.3%. Furthermore, the average length of the platoon decreases by 19.1%.</p>","PeriodicalId":156,"journal":{"name":"Computer-Aided Civil and Infrastructure Engineering","volume":"40 17","pages":"2561-2577"},"PeriodicalIF":9.1000,"publicationDate":"2025-03-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1111/mice.13463","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer-Aided Civil and Infrastructure Engineering","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1111/mice.13463","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
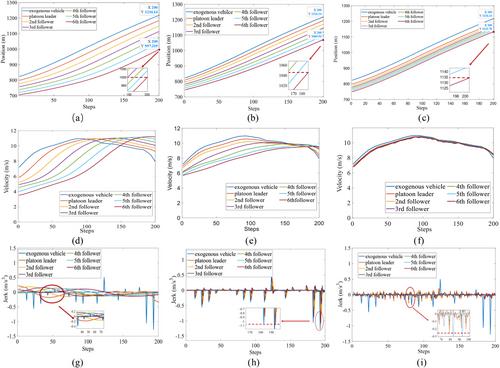
Coordinating a platoon of connected and automated vehicles significantly improves traffic efficiency and safety. Current platoon control methods prioritize consistency and convergence performance but overlook the inherent interdependence between the platoon and the the non-connected leading vehicle. This oversight constrains the platoon's adaptability in car-following scenarios, resulting in suboptimal optimization performance. To address this issue, this paper proposed a platoon control framework based on multi-agent reinforcement learning, aiming to integrate cooperative optimization with platoon tracking behavior and internal coordination strategies. This strategy employs a bidirectional cooperative optimization mechanism to effectively decouple the platoon's tracking behavior from its internal coordination control, and then recouple it in a multi-objective optimized manner. Additionally, it leverages long short-term memory networks to accurately capture and manage the platoon's dynamic nature over time, aiming to achieve enhanced optimization outcomes. The simulation results demonstrate that the proposed method effectively improves the platoon's cooperative effect and car-following adaptability. Compared to the consensus control strategy, it reduces the average spacing error by 8.3%. Furthermore, the average length of the platoon decreases by 19.1%.
期刊介绍:
Computer-Aided Civil and Infrastructure Engineering stands as a scholarly, peer-reviewed archival journal, serving as a vital link between advancements in computer technology and civil and infrastructure engineering. The journal serves as a distinctive platform for the publication of original articles, spotlighting novel computational techniques and inventive applications of computers. Specifically, it concentrates on recent progress in computer and information technologies, fostering the development and application of emerging computing paradigms.
Encompassing a broad scope, the journal addresses bridge, construction, environmental, highway, geotechnical, structural, transportation, and water resources engineering. It extends its reach to the management of infrastructure systems, covering domains such as highways, bridges, pavements, airports, and utilities. The journal delves into areas like artificial intelligence, cognitive modeling, concurrent engineering, database management, distributed computing, evolutionary computing, fuzzy logic, genetic algorithms, geometric modeling, internet-based technologies, knowledge discovery and engineering, machine learning, mobile computing, multimedia technologies, networking, neural network computing, optimization and search, parallel processing, robotics, smart structures, software engineering, virtual reality, and visualization techniques.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
