Jan-Willem Klok;Roelf Postema;Asþor T. Steinþorsson;Jenny Dankelman;Tim Horeman
{"title":"Design and Evaluation of a Balanced Compliant Laparoscopic Grasper","authors":"Jan-Willem Klok;Roelf Postema;Asþor T. Steinþorsson;Jenny Dankelman;Tim Horeman","doi":"10.1109/JTEHM.2023.3291925","DOIUrl":null,"url":null,"abstract":"In laparoscopic surgery, quality of haptic feedback is reduced compared to conventional surgery, leading to unintentional tissue damage during grasping. From the perspective of haptics, poor mechanical design of laparoscopic instrument joints induces friction and a nonlinear actuation-tip force relation. In this study, a novel laparoscopic grasper using compliant joints and a magnetic balancer is presented, and the reduction in hysteresis and friction is evaluated. The hysteresis loop of the novel compliant grasper and two conventional laparoscopic graspers (high quality leading commercial brand and low quality unbranded grasper) were measured. In order to assess quality of haptic feedback, the lowest grasper tip load perceivable by instrument users was measured with the novel and the conventional laparoscopic graspers. The hysteresis loop measurement yielded a mechanical efficiency of 43% for the novel grasper, compared to- 25% and 23% for the Aesculap and the unbranded grasper, respectively. The forces perceivable by the user through the novel grasper were significantly lower (mean 1.37N, SD 0.44N) than those of conventional graspers (mean 2.15N, SD 0.71N and mean 2.65N, SD 1.20N, respectively). The balanced compliant grasper technology has the ability to improve the quality of haptic feedback compared to conventional laparoscopic graspers. Research is needed to relate these results to soft and delicate tissue grasping in a clinical setting, for which this instrument is intended.","PeriodicalId":54255,"journal":{"name":"IEEE Journal of Translational Engineering in Health and Medicine-Jtehm","volume":"11 ","pages":"451-459"},"PeriodicalIF":4.4000,"publicationDate":"2023-07-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10172011","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IEEE Journal of Translational Engineering in Health and Medicine-Jtehm","FirstCategoryId":"5","ListUrlMain":"https://ieeexplore.ieee.org/document/10172011/","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
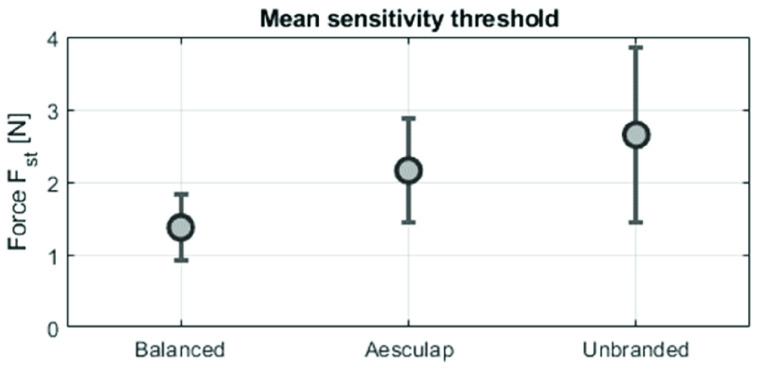
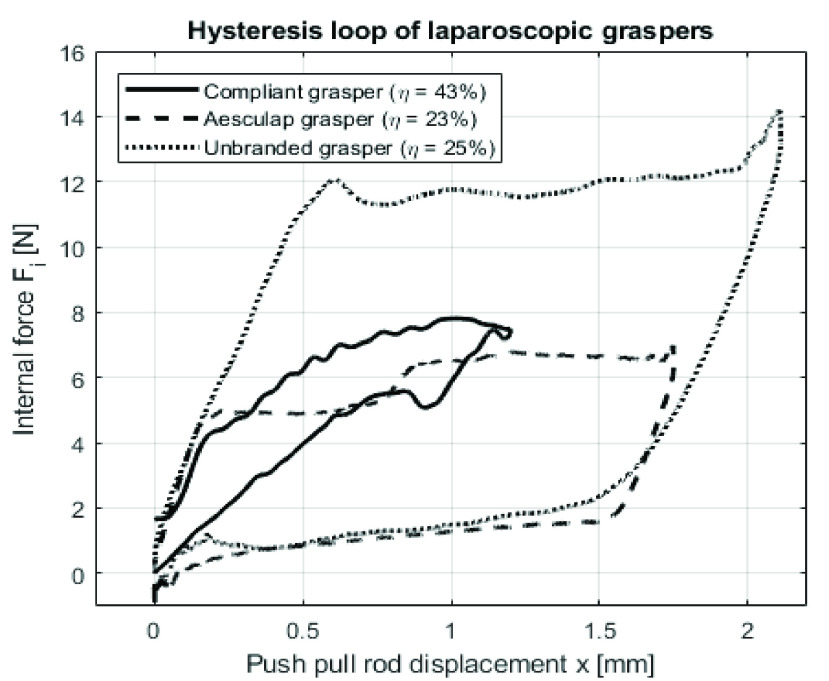
In laparoscopic surgery, quality of haptic feedback is reduced compared to conventional surgery, leading to unintentional tissue damage during grasping. From the perspective of haptics, poor mechanical design of laparoscopic instrument joints induces friction and a nonlinear actuation-tip force relation. In this study, a novel laparoscopic grasper using compliant joints and a magnetic balancer is presented, and the reduction in hysteresis and friction is evaluated. The hysteresis loop of the novel compliant grasper and two conventional laparoscopic graspers (high quality leading commercial brand and low quality unbranded grasper) were measured. In order to assess quality of haptic feedback, the lowest grasper tip load perceivable by instrument users was measured with the novel and the conventional laparoscopic graspers. The hysteresis loop measurement yielded a mechanical efficiency of 43% for the novel grasper, compared to- 25% and 23% for the Aesculap and the unbranded grasper, respectively. The forces perceivable by the user through the novel grasper were significantly lower (mean 1.37N, SD 0.44N) than those of conventional graspers (mean 2.15N, SD 0.71N and mean 2.65N, SD 1.20N, respectively). The balanced compliant grasper technology has the ability to improve the quality of haptic feedback compared to conventional laparoscopic graspers. Research is needed to relate these results to soft and delicate tissue grasping in a clinical setting, for which this instrument is intended.
期刊介绍:
The IEEE Journal of Translational Engineering in Health and Medicine is an open access product that bridges the engineering and clinical worlds, focusing on detailed descriptions of advanced technical solutions to a clinical need along with clinical results and healthcare relevance. The journal provides a platform for state-of-the-art technology directions in the interdisciplinary field of biomedical engineering, embracing engineering, life sciences and medicine. A unique aspect of the journal is its ability to foster a collaboration between physicians and engineers for presenting broad and compelling real world technological and engineering solutions that can be implemented in the interest of improving quality of patient care and treatment outcomes, thereby reducing costs and improving efficiency. The journal provides an active forum for clinical research and relevant state-of the-art technology for members of all the IEEE societies that have an interest in biomedical engineering as well as reaching out directly to physicians and the medical community through the American Medical Association (AMA) and other clinical societies. The scope of the journal includes, but is not limited, to topics on: Medical devices, healthcare delivery systems, global healthcare initiatives, and ICT based services; Technological relevance to healthcare cost reduction; Technology affecting healthcare management, decision-making, and policy; Advanced technical work that is applied to solving specific clinical needs.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
