Pietro Anoldo, Michele Manigrasso, Anna D’Amore, Mario Musella, Giovanni Domenico De Palma, Marco Milone
{"title":"Dual docking technique for robotic repair of simultaneous inguinal and umbilical hernia: A preliminary single center experience","authors":"Pietro Anoldo, Michele Manigrasso, Anna D’Amore, Mario Musella, Giovanni Domenico De Palma, Marco Milone","doi":"10.1002/rcs.2586","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>This study aimed to assess clinical results in terms of intraoperative outcomes, recovery and recurrence of our robotic technique for the treatment of patients affected by simultaneous inguinal and umbilical hernia, providing technical details to facilitate multiquadrant surgery in robotic hernia repair.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>Data from patients affected by simultaneous primary inguinal and umbilical hernia who underwent robotic repair with our dual docking technique was retrospectively analysed.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>Fifteen patients were included. No intraoperative complications occurred. All patients achieved complete mobilisation within 7 h. The mean length of hospital stay was 21.6 h, with five patients discharged on the same day of surgery. There was no major complication and no recurrence within the median follow-up period of 673 days.</p>\n </section>\n \n <section>\n \n <h3> Conclusions</h3>\n \n <p>This surgical technique shows optimal postoperative outcomes, such as early mobilisation and short length of stay. Our study provides an aid to surgeons performing multiquadrant robotic surgery for the treatment of abdominal hernias.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 1","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2023-10-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2586","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2586","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background
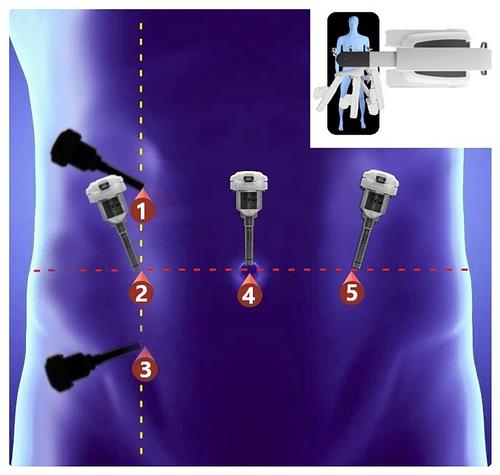
This study aimed to assess clinical results in terms of intraoperative outcomes, recovery and recurrence of our robotic technique for the treatment of patients affected by simultaneous inguinal and umbilical hernia, providing technical details to facilitate multiquadrant surgery in robotic hernia repair.
Methods
Data from patients affected by simultaneous primary inguinal and umbilical hernia who underwent robotic repair with our dual docking technique was retrospectively analysed.
Results
Fifteen patients were included. No intraoperative complications occurred. All patients achieved complete mobilisation within 7 h. The mean length of hospital stay was 21.6 h, with five patients discharged on the same day of surgery. There was no major complication and no recurrence within the median follow-up period of 673 days.
Conclusions
This surgical technique shows optimal postoperative outcomes, such as early mobilisation and short length of stay. Our study provides an aid to surgeons performing multiquadrant robotic surgery for the treatment of abdominal hernias.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
