Chee-An Yu, Hao-Yun Chen, Chun-Chieh Wang, Li-Chen Fu
{"title":"Complex environment localization system using complementary ceiling and ground map information","authors":"Chee-An Yu, Hao-Yun Chen, Chun-Chieh Wang, Li-Chen Fu","doi":"10.1007/s10514-023-10116-6","DOIUrl":null,"url":null,"abstract":"<div><p>This paper proposes a robust localization system using complementary information extracted from ceiling and ground plans, particularly applicable to dynamic and complex environments. The ceiling perception provides the robot with stable and time-invariant environmental features independent of the dynamic changes on the ground, whereas the ground perception allows the robot to navigate in the ground plane while avoiding stationary obstacles. We propose an architecture to fuse ground 2D LiDAR scan and ceiling 3D LiDAR scan with our enhanced mapping algorithm associating perception from both sources efficiently. The localization ability and the navigation performance can be promisingly secured even in a harsh environment with our complementary sensed information from the ground and ceiling. The salient feature of our work is that our system can simultaneously map both the ceiling and ground plane efficiently without extra efforts of deploying articulated landmarks and apply such hybrid information effectively, which facilitates the robot to travel through any indoor environment with human crowds without getting lost.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 6","pages":"669 - 683"},"PeriodicalIF":4.3000,"publicationDate":"2023-06-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10116-6.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10116-6","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
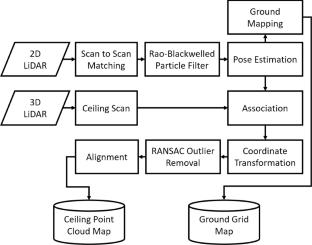
This paper proposes a robust localization system using complementary information extracted from ceiling and ground plans, particularly applicable to dynamic and complex environments. The ceiling perception provides the robot with stable and time-invariant environmental features independent of the dynamic changes on the ground, whereas the ground perception allows the robot to navigate in the ground plane while avoiding stationary obstacles. We propose an architecture to fuse ground 2D LiDAR scan and ceiling 3D LiDAR scan with our enhanced mapping algorithm associating perception from both sources efficiently. The localization ability and the navigation performance can be promisingly secured even in a harsh environment with our complementary sensed information from the ground and ceiling. The salient feature of our work is that our system can simultaneously map both the ceiling and ground plane efficiently without extra efforts of deploying articulated landmarks and apply such hybrid information effectively, which facilitates the robot to travel through any indoor environment with human crowds without getting lost.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
