Alessandro Antonucci, Paolo Bevilacqua, Stefano Leonardi, Luigi Paolopoli, Daniele Fontanelli
{"title":"Humans as path-finders for mobile robots using teach-by-showing navigation","authors":"Alessandro Antonucci, Paolo Bevilacqua, Stefano Leonardi, Luigi Paolopoli, Daniele Fontanelli","doi":"10.1007/s10514-023-10125-5","DOIUrl":null,"url":null,"abstract":"<div><p>One of the most important barriers towards a widespread use of mobile robots in unstructured, human populated and possibly a-priori unknown work environments is the ability to plan a safe path. In this paper, we propose to delegate this activity to a human operator that walks in front of the robot marking with her/his footsteps the path to be followed. The implementation of this approach requires a high degree of robustness in locating the specific person to be followed (the <i>path-finder</i>). We propose a three phases approach to fulfil this goal: 1. Identification and tracking of the person in the image space, 2. Sensor fusion between camera data and laser sensors, 3. Point interpolation with continuous curvature paths. The approach is described in the paper and extensively validated with experimental results.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1255 - 1273"},"PeriodicalIF":4.3000,"publicationDate":"2023-08-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10125-5.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10125-5","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
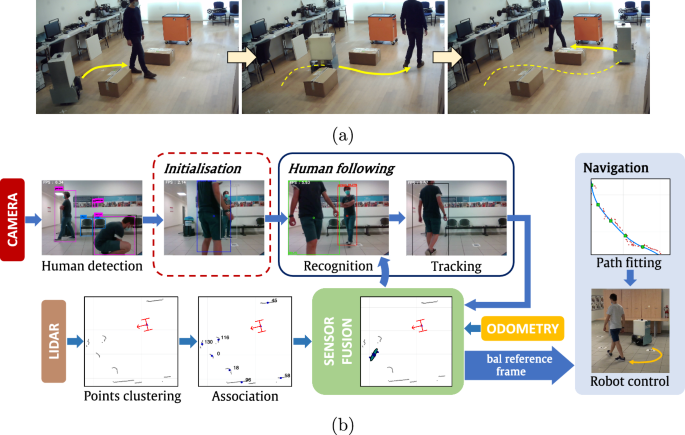
One of the most important barriers towards a widespread use of mobile robots in unstructured, human populated and possibly a-priori unknown work environments is the ability to plan a safe path. In this paper, we propose to delegate this activity to a human operator that walks in front of the robot marking with her/his footsteps the path to be followed. The implementation of this approach requires a high degree of robustness in locating the specific person to be followed (the path-finder). We propose a three phases approach to fulfil this goal: 1. Identification and tracking of the person in the image space, 2. Sensor fusion between camera data and laser sensors, 3. Point interpolation with continuous curvature paths. The approach is described in the paper and extensively validated with experimental results.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
