{"title":"Advanced Speed-and-current control approach for dynamic electric car modelling","authors":"Buddhadeva Sahoo, Sangram Keshari Routray, Pravat Kumar Rout","doi":"10.1049/els2.12015","DOIUrl":null,"url":null,"abstract":"<p>Considering environmental conditions and reduced fuel availability, electric cars (ECs) play a vital role in many applications such as consumer cars and short-distance transportation. This paper proposes a detailed dynamic modelling of battery, motor, and inverter developed for the design of an EC. In addition, an improved controller is developed with a different geometrical method using the sensitivity gain of the current sensor and tachometer to assure the optimal performance of the EC. For achieving linear vehicle operation and improved stability, a system transfer function model is designed by considering various uncertainties such as force acting on the car, wheel, road, and wind speed conditions. To offer better regulation and excellent tracking operation of the EC, a combined proportional–integral–derivative controller-based outer-speed and inner-current control approach is suggested to regulate the nonlinear parameters for different driving profile applications. The proposed designed control approach and system model are tested using two input conditions such as step and driving profile inputs through MATLAB/Simulink software, and performance is analysed through various open-loop and closed-loop test scenarios.</p>","PeriodicalId":48518,"journal":{"name":"IET Electrical Systems in Transportation","volume":"11 3","pages":"200-217"},"PeriodicalIF":2.2000,"publicationDate":"2021-03-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/els2.12015","citationCount":"8","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Electrical Systems in Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/els2.12015","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 8
Abstract
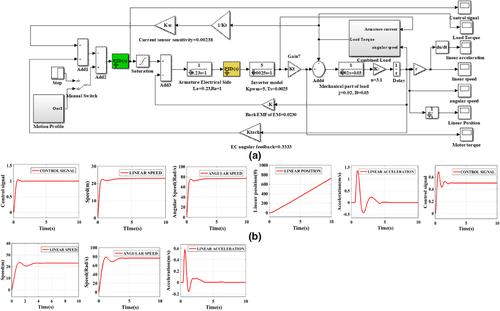
Considering environmental conditions and reduced fuel availability, electric cars (ECs) play a vital role in many applications such as consumer cars and short-distance transportation. This paper proposes a detailed dynamic modelling of battery, motor, and inverter developed for the design of an EC. In addition, an improved controller is developed with a different geometrical method using the sensitivity gain of the current sensor and tachometer to assure the optimal performance of the EC. For achieving linear vehicle operation and improved stability, a system transfer function model is designed by considering various uncertainties such as force acting on the car, wheel, road, and wind speed conditions. To offer better regulation and excellent tracking operation of the EC, a combined proportional–integral–derivative controller-based outer-speed and inner-current control approach is suggested to regulate the nonlinear parameters for different driving profile applications. The proposed designed control approach and system model are tested using two input conditions such as step and driving profile inputs through MATLAB/Simulink software, and performance is analysed through various open-loop and closed-loop test scenarios.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
