{"title":"High-frame rate homography and visual odometry by tracking binary features from the focal plane","authors":"Riku Murai, Sajad Saeedi, Paul H. J. Kelly","doi":"10.1007/s10514-023-10122-8","DOIUrl":null,"url":null,"abstract":"<div><p>Robotics faces a long-standing obstacle in which the speed of the vision system’s scene understanding is insufficient, impeding the robot’s ability to perform agile tasks. Consequently, robots must often rely on interpolation and extrapolation of the vision data to accomplish tasks in a timely and effective manner. One of the primary reasons for these delays is the analog-to-digital conversion that occurs on a per-pixel basis across the image sensor, along with the transfer of pixel-intensity information to the host device. This results in significant delays and power consumption in modern visual processing pipelines. The SCAMP-5—a general-purpose Focal-plane Sensor-processor array (FPSP)—used in this research performs computations in the analog domain prior to analog-to-digital conversion. By extracting features from the image on the focal plane, the amount of data that needs to be digitised and transferred is reduced. This allows for a high frame rate and low energy consumption for the SCAMP-5. The focus of our work is on localising the camera within the scene, which is crucial for scene understanding and for any downstream robotics tasks. We present a localisation system that utilise the FPSP in two parts. First, a 6-DoF odometry system is introduced, which efficiently estimates its position against a known marker at over 400 FPS. Second, our work is extended to implement BIT-VO—6-DoF visual odometry system which operates under an unknown natural environment at 300 FPS.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1579 - 1592"},"PeriodicalIF":4.3000,"publicationDate":"2023-07-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10122-8.pdf","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10122-8","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 1
Abstract
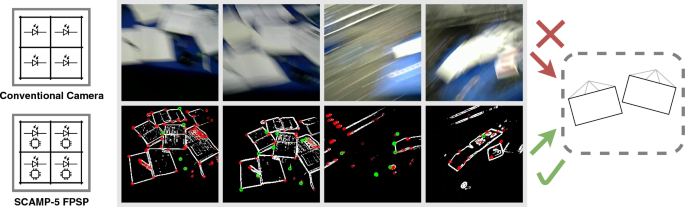
Robotics faces a long-standing obstacle in which the speed of the vision system’s scene understanding is insufficient, impeding the robot’s ability to perform agile tasks. Consequently, robots must often rely on interpolation and extrapolation of the vision data to accomplish tasks in a timely and effective manner. One of the primary reasons for these delays is the analog-to-digital conversion that occurs on a per-pixel basis across the image sensor, along with the transfer of pixel-intensity information to the host device. This results in significant delays and power consumption in modern visual processing pipelines. The SCAMP-5—a general-purpose Focal-plane Sensor-processor array (FPSP)—used in this research performs computations in the analog domain prior to analog-to-digital conversion. By extracting features from the image on the focal plane, the amount of data that needs to be digitised and transferred is reduced. This allows for a high frame rate and low energy consumption for the SCAMP-5. The focus of our work is on localising the camera within the scene, which is crucial for scene understanding and for any downstream robotics tasks. We present a localisation system that utilise the FPSP in two parts. First, a 6-DoF odometry system is introduced, which efficiently estimates its position against a known marker at over 400 FPS. Second, our work is extended to implement BIT-VO—6-DoF visual odometry system which operates under an unknown natural environment at 300 FPS.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
