Moise Raphael Tsimbo Fokou, Qirong Xia, Hu Jin, Min Xu, Erbao Dong
{"title":"A Soft Robotic Fish Actuated by Artificial Muscle Modules (SoRoFAAM-1)","authors":"Moise Raphael Tsimbo Fokou, Qirong Xia, Hu Jin, Min Xu, Erbao Dong","doi":"10.1007/s42235-023-00390-6","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, we present the design, fabrication, locomotion and bionic analysis of a Soft Robotic Fish Actuated by Artificial Muscle (SoRoFAAM). As a carangiform swimmer, the most important part of SoRoFAAM-1, on the motion point of view, is its tail designed around a bidirectional flexible bending actuator by layered bonding technology. This actuator is made of two artificial muscle modules based on Shape Memory Alloy (SMA) wires. Each artificial muscle module has four independent SMA-wire channels and is therefore capable of producing four different actuations. This design allows us to implement an adaptive regulated control strategy based on resistance feedback of the SMA wires to prevent them from overheating. To improve the actuation frequency to 2 Hz and the heat-dissipation ratio by 60%, we developed a round-robin heating strategy. Furthermore, the thermomechanical model of actuator is built, and the thermal transformation is analysed. The relationships between the actuation parameters and SoRoFAAM-1’s kinematic parameters are analysed. The versatility of the actuator endows SoRoFAAM-1 with cruise straight and turning abilities. Moreover, SoRoFAAM-1 has a good bionic fidelity; in particular, a maneuverability of 0.15, a head swing factor of 0.38 and a Strouhal number of 0.61.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"20 5","pages":"2030 - 2043"},"PeriodicalIF":5.8000,"publicationDate":"2023-07-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s42235-023-00390-6.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-023-00390-6","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
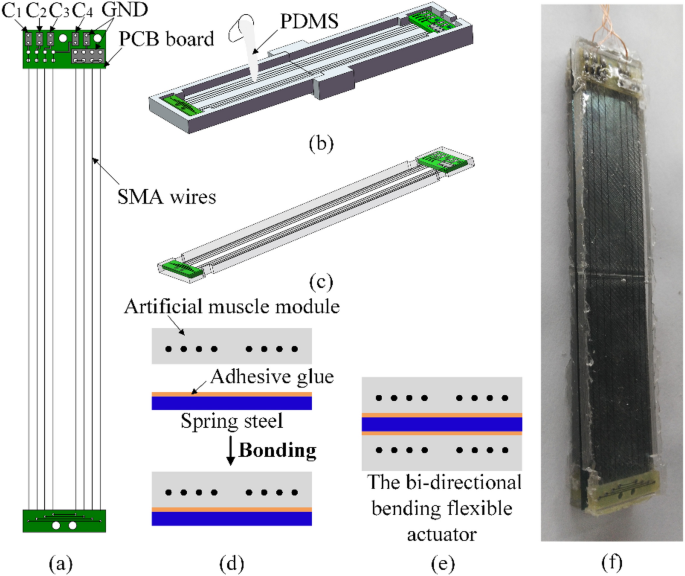
In this paper, we present the design, fabrication, locomotion and bionic analysis of a Soft Robotic Fish Actuated by Artificial Muscle (SoRoFAAM). As a carangiform swimmer, the most important part of SoRoFAAM-1, on the motion point of view, is its tail designed around a bidirectional flexible bending actuator by layered bonding technology. This actuator is made of two artificial muscle modules based on Shape Memory Alloy (SMA) wires. Each artificial muscle module has four independent SMA-wire channels and is therefore capable of producing four different actuations. This design allows us to implement an adaptive regulated control strategy based on resistance feedback of the SMA wires to prevent them from overheating. To improve the actuation frequency to 2 Hz and the heat-dissipation ratio by 60%, we developed a round-robin heating strategy. Furthermore, the thermomechanical model of actuator is built, and the thermal transformation is analysed. The relationships between the actuation parameters and SoRoFAAM-1’s kinematic parameters are analysed. The versatility of the actuator endows SoRoFAAM-1 with cruise straight and turning abilities. Moreover, SoRoFAAM-1 has a good bionic fidelity; in particular, a maneuverability of 0.15, a head swing factor of 0.38 and a Strouhal number of 0.61.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
