Ziyi Guo, Chenchen Zhuang, Yihang Song, Joel Yong, Yi Li, Zhong Guo, Biao Kong, John M. Whitelock, Joseph Wang, Kang Liang
{"title":"Biocatalytic Buoyancy-Driven Nanobots for Autonomous Cell Recognition and Enrichment","authors":"Ziyi Guo, Chenchen Zhuang, Yihang Song, Joel Yong, Yi Li, Zhong Guo, Biao Kong, John M. Whitelock, Joseph Wang, Kang Liang","doi":"10.1007/s40820-023-01207-1","DOIUrl":null,"url":null,"abstract":"<div><p>Autonomously self-propelled nanoswimmers represent the next-generation nano-devices for bio- and environmental technology. However, current nanoswimmers generate limited energy output and can only move in short distances and duration, thus are struggling to be applied in practical challenges, such as living cell transportation. Here, we describe the construction of biodegradable metal–organic framework based nanobots with chemically driven buoyancy to achieve highly efficient, long-distance, directional vertical motion to “find-and-fetch” target cells. Nanobots surface-functionalized with antibodies against the cell surface marker carcinoembryonic antigen are exploited to impart the nanobots with specific cell targeting capacity to recognize and separate cancer cells. We demonstrate that the self-propelled motility of the nanobots can sufficiently transport the recognized cells autonomously, and the separated cells can be easily collected with a customized glass column, and finally regain their full metabolic potential after the separation. The utilization of nanobots with easy synthetic pathway shows considerable promise in cell recognition, separation, and enrichment. </p><div><figure><div><div><picture><source><img></source></picture></div></div></figure></div></div>","PeriodicalId":48779,"journal":{"name":"Nano-Micro Letters","volume":"15 1","pages":""},"PeriodicalIF":36.3000,"publicationDate":"2023-10-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10597912/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nano-Micro Letters","FirstCategoryId":"88","ListUrlMain":"https://link.springer.com/article/10.1007/s40820-023-01207-1","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
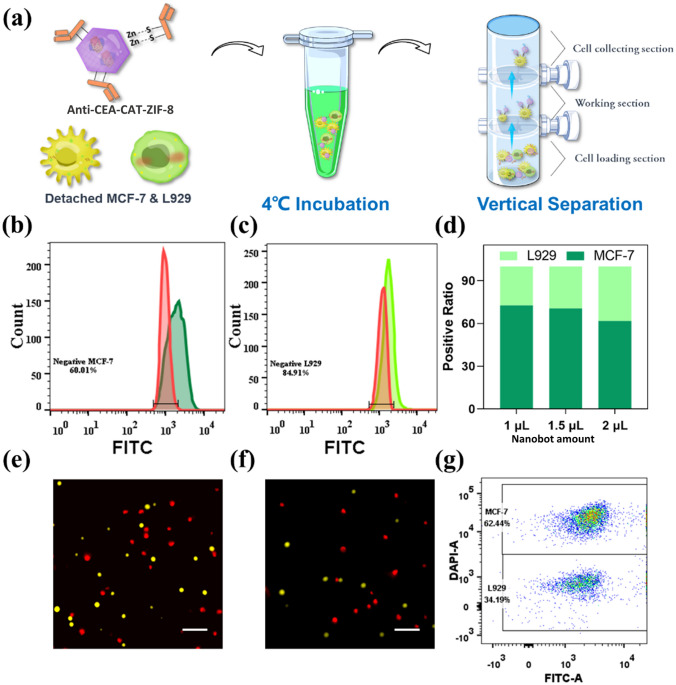
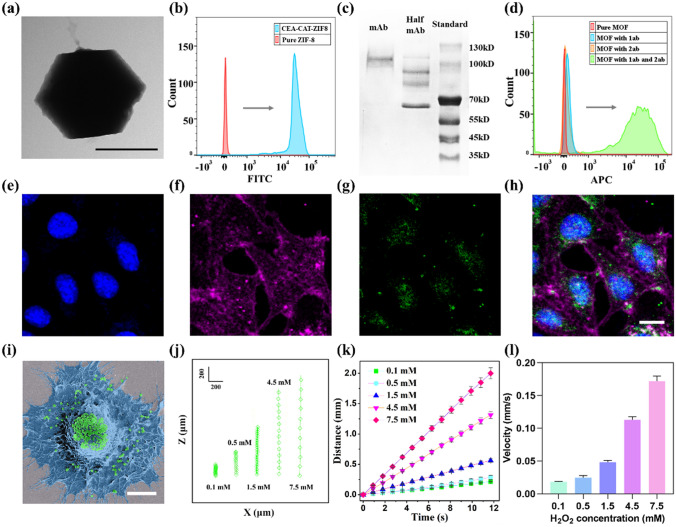
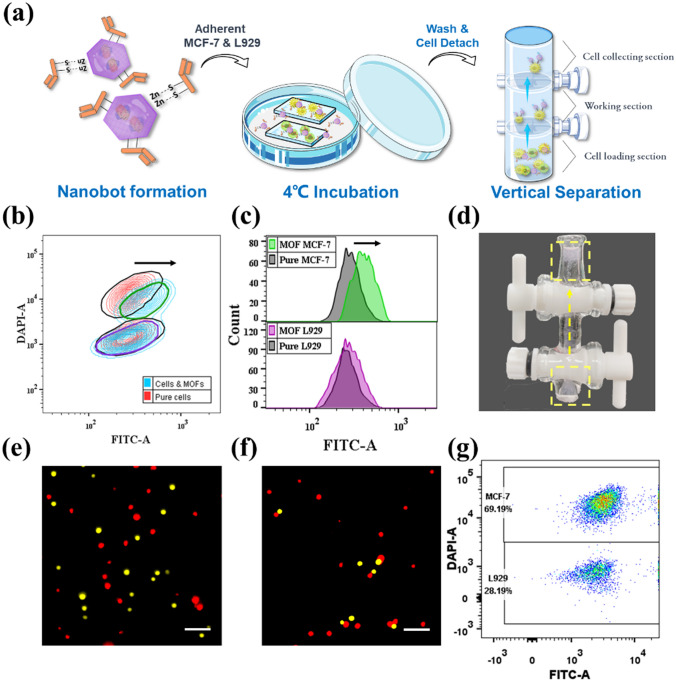
Autonomously self-propelled nanoswimmers represent the next-generation nano-devices for bio- and environmental technology. However, current nanoswimmers generate limited energy output and can only move in short distances and duration, thus are struggling to be applied in practical challenges, such as living cell transportation. Here, we describe the construction of biodegradable metal–organic framework based nanobots with chemically driven buoyancy to achieve highly efficient, long-distance, directional vertical motion to “find-and-fetch” target cells. Nanobots surface-functionalized with antibodies against the cell surface marker carcinoembryonic antigen are exploited to impart the nanobots with specific cell targeting capacity to recognize and separate cancer cells. We demonstrate that the self-propelled motility of the nanobots can sufficiently transport the recognized cells autonomously, and the separated cells can be easily collected with a customized glass column, and finally regain their full metabolic potential after the separation. The utilization of nanobots with easy synthetic pathway shows considerable promise in cell recognition, separation, and enrichment.
期刊介绍:
Nano-Micro Letters is a peer-reviewed, international, interdisciplinary and open-access journal that focus on science, experiments, engineering, technologies and applications of nano- or microscale structure and system in physics, chemistry, biology, material science, pharmacy and their expanding interfaces with at least one dimension ranging from a few sub-nanometers to a few hundreds of micrometers. Especially, emphasize the bottom-up approach in the length scale from nano to micro since the key for nanotechnology to reach industrial applications is to assemble, to modify, and to control nanostructure in micro scale. The aim is to provide a publishing platform crossing the boundaries, from nano to micro, and from science to technologies.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
