Ling Zheng, Chengzhi Hong, Huashan Song, Rong Chen
{"title":"An autonomous mobile robot path planning strategy using an enhanced slime mold algorithm.","authors":"Ling Zheng, Chengzhi Hong, Huashan Song, Rong Chen","doi":"10.3389/fnbot.2023.1270860","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Autonomous mobile robot encompasses modules such as perception, path planning, decision-making, and control. Among these modules, path planning serves as a prerequisite for mobile robots to accomplish tasks. Enhancing path planning capability of mobile robots can effectively save costs, reduce energy consumption, and improve work efficiency. The primary slime mold algorithm (SMA) exhibits characteristics such as a reduced number of parameters, strong robustness, and a relatively high level of exploratory ability. SMA performs well in path planning for mobile robots. However, it is prone to local optimization and lacks dynamic obstacle avoidance, making it less effective in real-world settings.</p><p><strong>Methods: </strong>This paper presents an enhanced SMA (ESMA) path-planning algorithm for mobile robots. The ESMA algorithm incorporates adaptive techniques to enhance global search capabilities and integrates an artificial potential field to improve dynamic obstacle avoidance.</p><p><strong>Results and discussion: </strong>Compared to the SMA algorithm, the SMA-AGDE algorithm, which combines the Adaptive Guided Differential Evolution algorithm, and the Lévy Flight-Rotation SMA (LRSMA) algorithm, resulted in an average reduction in the minimum path length of (3.92%, 8.93%, 2.73%), along with corresponding reductions in path minimum values and processing times. Experiments show ESMA can find shortest collision-free paths for mobile robots in both static and dynamic environments.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1270860"},"PeriodicalIF":2.8000,"publicationDate":"2023-10-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10616528/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1270860","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
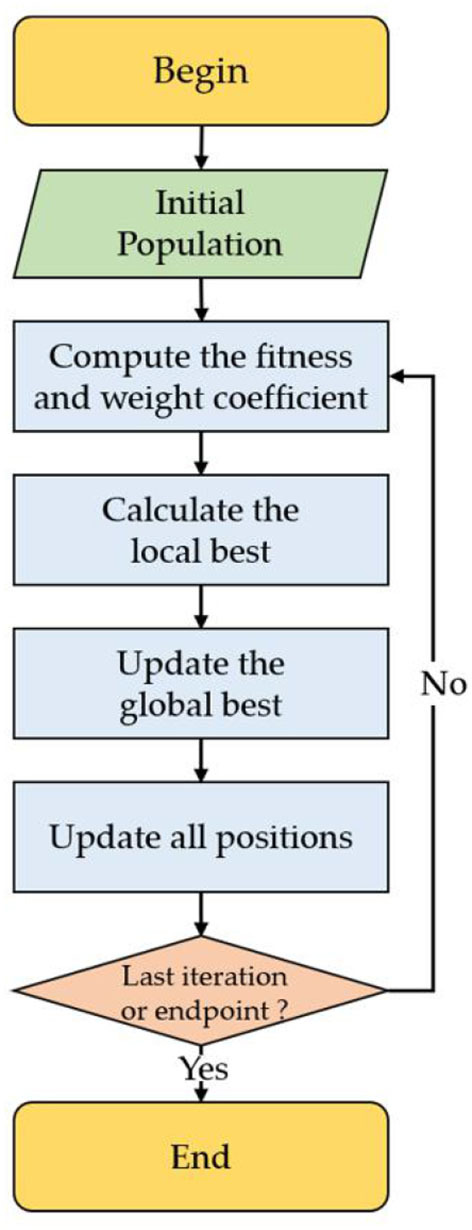
Introduction: Autonomous mobile robot encompasses modules such as perception, path planning, decision-making, and control. Among these modules, path planning serves as a prerequisite for mobile robots to accomplish tasks. Enhancing path planning capability of mobile robots can effectively save costs, reduce energy consumption, and improve work efficiency. The primary slime mold algorithm (SMA) exhibits characteristics such as a reduced number of parameters, strong robustness, and a relatively high level of exploratory ability. SMA performs well in path planning for mobile robots. However, it is prone to local optimization and lacks dynamic obstacle avoidance, making it less effective in real-world settings.
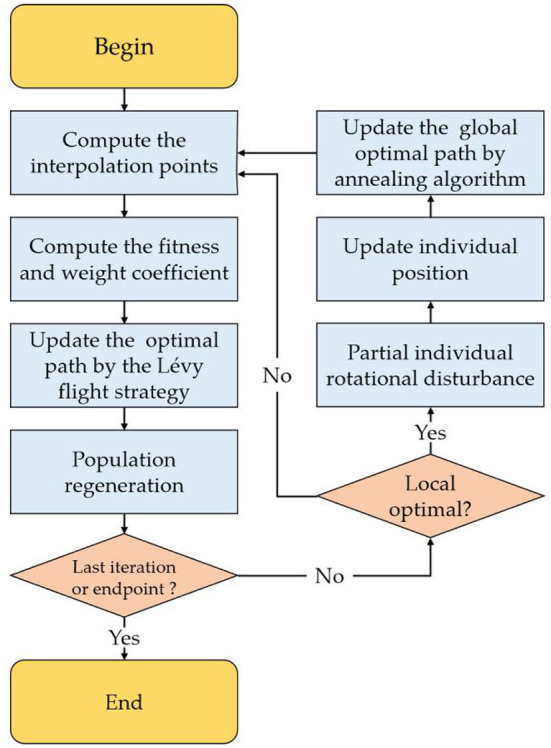
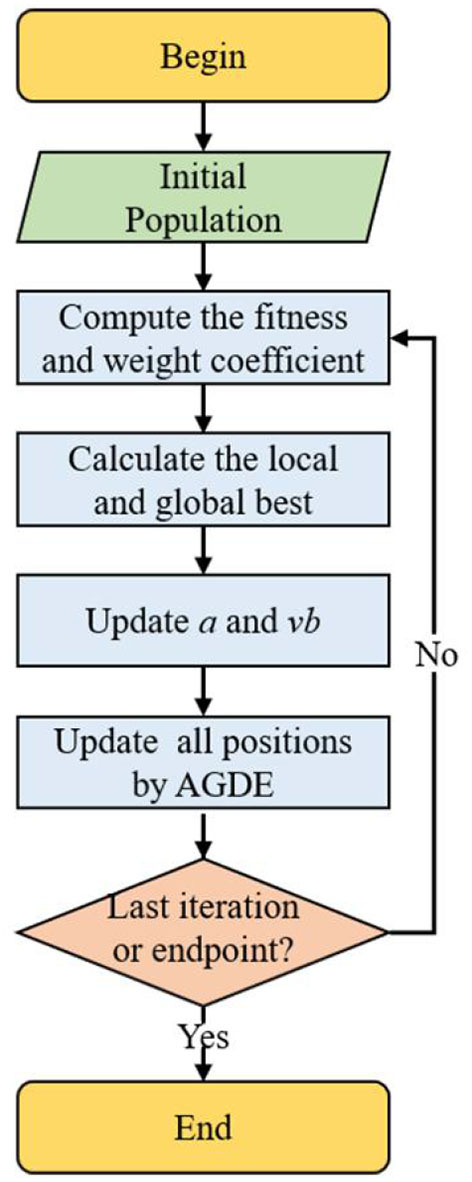
Methods: This paper presents an enhanced SMA (ESMA) path-planning algorithm for mobile robots. The ESMA algorithm incorporates adaptive techniques to enhance global search capabilities and integrates an artificial potential field to improve dynamic obstacle avoidance.
Results and discussion: Compared to the SMA algorithm, the SMA-AGDE algorithm, which combines the Adaptive Guided Differential Evolution algorithm, and the Lévy Flight-Rotation SMA (LRSMA) algorithm, resulted in an average reduction in the minimum path length of (3.92%, 8.93%, 2.73%), along with corresponding reductions in path minimum values and processing times. Experiments show ESMA can find shortest collision-free paths for mobile robots in both static and dynamic environments.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
