Lena Kopnarski, Laura Lippert, Julian Rudisch, Claudia Voelcker-Rehage
{"title":"Predicting object properties based on movement kinematics.","authors":"Lena Kopnarski, Laura Lippert, Julian Rudisch, Claudia Voelcker-Rehage","doi":"10.1186/s40708-023-00209-4","DOIUrl":null,"url":null,"abstract":"<p><p>In order to grasp and transport an object, grip and load forces must be scaled according to the object's properties (such as weight). To select the appropriate grip and load forces, the object weight is estimated based on experience or, in the case of robots, usually by use of image recognition. We propose a new approach that makes a robot's weight estimation less dependent on prior learning and, thereby, allows it to successfully grasp a wider variety of objects. This study evaluates whether it is feasible to predict an object's weight class in a replacement task based on the time series of upper body angles of the active arm or on object velocity profiles. Furthermore, we wanted to investigate how prediction accuracy is affected by (i) the length of the time series and (ii) different cross-validation (CV) procedures. To this end, we recorded and analyzed the movement kinematics of 12 participants during a replacement task. The participants' kinematics were recorded by an optical motion tracking system while transporting an object, 80 times in total from varying starting positions to a predefined end position on a table. The object's weight was modified (made lighter and heavier) without changing the object's visual appearance. Throughout the experiment, the object's weight (light/heavy) was randomly changed without the participant's knowledge. To predict the object's weight class, we used a discrete cosine transform to smooth and compress the time series and a support vector machine for supervised learning from the achieved discrete cosine transform parameters. Results showed good prediction accuracy (up to [Formula: see text], depending on the CV procedure and the length of the time series). Even at the beginning of a movement (after only 300 ms), we were able to predict the object weight reliably (within a classification rate of [Formula: see text]).</p>","PeriodicalId":37465,"journal":{"name":"Brain Informatics","volume":"10 1","pages":"29"},"PeriodicalIF":4.5000,"publicationDate":"2023-11-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10625504/pdf/","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Brain Informatics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s40708-023-00209-4","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"Computer Science","Score":null,"Total":0}
引用次数: 1
Abstract
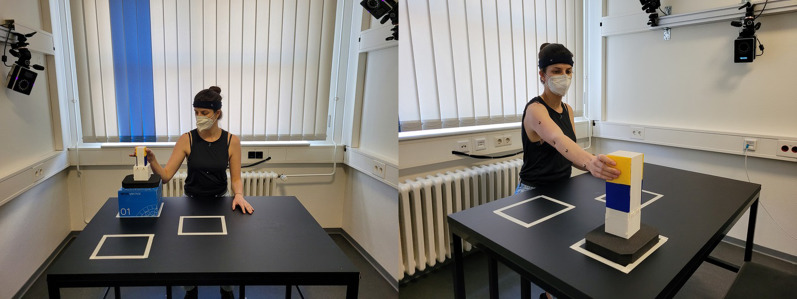
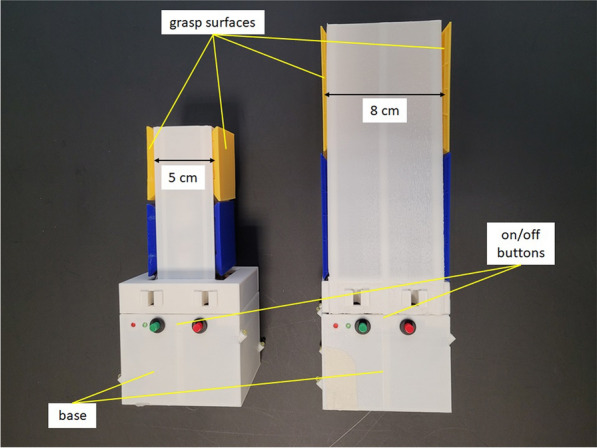
In order to grasp and transport an object, grip and load forces must be scaled according to the object's properties (such as weight). To select the appropriate grip and load forces, the object weight is estimated based on experience or, in the case of robots, usually by use of image recognition. We propose a new approach that makes a robot's weight estimation less dependent on prior learning and, thereby, allows it to successfully grasp a wider variety of objects. This study evaluates whether it is feasible to predict an object's weight class in a replacement task based on the time series of upper body angles of the active arm or on object velocity profiles. Furthermore, we wanted to investigate how prediction accuracy is affected by (i) the length of the time series and (ii) different cross-validation (CV) procedures. To this end, we recorded and analyzed the movement kinematics of 12 participants during a replacement task. The participants' kinematics were recorded by an optical motion tracking system while transporting an object, 80 times in total from varying starting positions to a predefined end position on a table. The object's weight was modified (made lighter and heavier) without changing the object's visual appearance. Throughout the experiment, the object's weight (light/heavy) was randomly changed without the participant's knowledge. To predict the object's weight class, we used a discrete cosine transform to smooth and compress the time series and a support vector machine for supervised learning from the achieved discrete cosine transform parameters. Results showed good prediction accuracy (up to [Formula: see text], depending on the CV procedure and the length of the time series). Even at the beginning of a movement (after only 300 ms), we were able to predict the object weight reliably (within a classification rate of [Formula: see text]).
期刊介绍:
Brain Informatics is an international, peer-reviewed, interdisciplinary open-access journal published under the brand SpringerOpen, which provides a unique platform for researchers and practitioners to disseminate original research on computational and informatics technologies related to brain. This journal addresses the computational, cognitive, physiological, biological, physical, ecological and social perspectives of brain informatics. It also welcomes emerging information technologies and advanced neuro-imaging technologies, such as big data analytics and interactive knowledge discovery related to various large-scale brain studies and their applications. This journal will publish high-quality original research papers, brief reports and critical reviews in all theoretical, technological, clinical and interdisciplinary studies that make up the field of brain informatics and its applications in brain-machine intelligence, brain-inspired intelligent systems, mental health and brain disorders, etc. The scope of papers includes the following five tracks: Track 1: Cognitive and Computational Foundations of Brain Science Track 2: Human Information Processing Systems Track 3: Brain Big Data Analytics, Curation and Management Track 4: Informatics Paradigms for Brain and Mental Health Research Track 5: Brain-Machine Intelligence and Brain-Inspired Computing




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
