{"title":"软弹性体行为中温度和湿度相关性的表征。","authors":"Elze Porte, Sophia Eristoff, Anjali Agrawala, Rebecca Kramer-Bottiglio","doi":"10.1089/soro.2023.0004","DOIUrl":null,"url":null,"abstract":"<p><p>Soft robots are predicted to operate well in unstructured environments due to their resilience to impacts, embodied intelligence, and potential ability to adapt to uncertain circumstances. Soft robots are of further interest for space and extraterrestrial missions, owing to their lightweight and compressible construction. Most soft robots in the literature to-date are made of elastomer bodies. However, limited data are available on the material characteristics of commonly used elastomers in extreme environments. In this study, we characterize four commonly used elastomers in the soft robotics literature-EcoFlex 00-30, Dragon Skin 10, Smooth-Sil 950, and Sylgard 184-in a temperature range of -40°C to 80°C and humidity range of 5-95% RH. We perform pull-to-failure, stiffness, and stress-relaxation tests. Furthermore, we perform a case study on soft elastomers used in stretchable capacitive sensors to evaluate the implications of the constituent material behavior on component performance. We find that all elastomers show temperature-dependent behavior, with typical stiffening of the material and a lower strain at failure with increasing temperature. The stress-relaxation response to temperature depends on the type of elastomer. Limited material effects are observed in response to different humidity conditions. The mechanical properties of the capacitive sensors are only dependent on temperature, but the measured capacitance shows changes related to both humidity and temperature changes, indicating that component-specific properties need to be considered in tandem with the mechanical design. This study provides essential insights into elastomer behavior for the design and successful operation of soft robots in varied environmental conditions.</p>","PeriodicalId":48685,"journal":{"name":"Soft Robotics","volume":" ","pages":"118-130"},"PeriodicalIF":6.1000,"publicationDate":"2024-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10880277/pdf/","citationCount":"0","resultStr":"{\"title\":\"Characterization of Temperature and Humidity Dependence in Soft Elastomer Behavior.\",\"authors\":\"Elze Porte, Sophia Eristoff, Anjali Agrawala, Rebecca Kramer-Bottiglio\",\"doi\":\"10.1089/soro.2023.0004\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Soft robots are predicted to operate well in unstructured environments due to their resilience to impacts, embodied intelligence, and potential ability to adapt to uncertain circumstances. Soft robots are of further interest for space and extraterrestrial missions, owing to their lightweight and compressible construction. Most soft robots in the literature to-date are made of elastomer bodies. However, limited data are available on the material characteristics of commonly used elastomers in extreme environments. In this study, we characterize four commonly used elastomers in the soft robotics literature-EcoFlex 00-30, Dragon Skin 10, Smooth-Sil 950, and Sylgard 184-in a temperature range of -40°C to 80°C and humidity range of 5-95% RH. We perform pull-to-failure, stiffness, and stress-relaxation tests. Furthermore, we perform a case study on soft elastomers used in stretchable capacitive sensors to evaluate the implications of the constituent material behavior on component performance. We find that all elastomers show temperature-dependent behavior, with typical stiffening of the material and a lower strain at failure with increasing temperature. The stress-relaxation response to temperature depends on the type of elastomer. Limited material effects are observed in response to different humidity conditions. The mechanical properties of the capacitive sensors are only dependent on temperature, but the measured capacitance shows changes related to both humidity and temperature changes, indicating that component-specific properties need to be considered in tandem with the mechanical design. This study provides essential insights into elastomer behavior for the design and successful operation of soft robots in varied environmental conditions.</p>\",\"PeriodicalId\":48685,\"journal\":{\"name\":\"Soft Robotics\",\"volume\":\" \",\"pages\":\"118-130\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2024-02-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10880277/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Soft Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1089/soro.2023.0004\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/9/5 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1089/soro.2023.0004","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/9/5 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
摘要
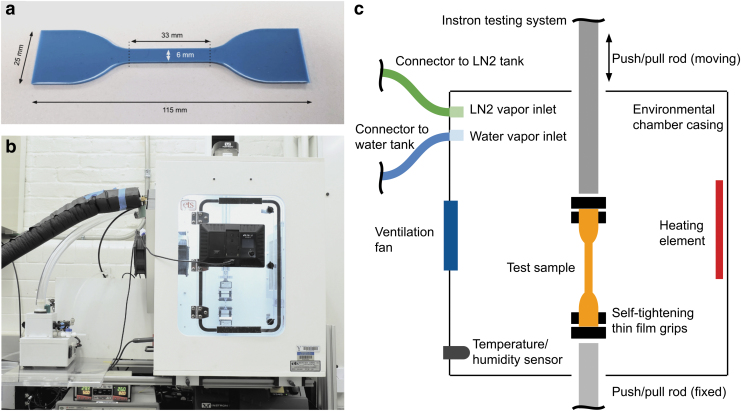
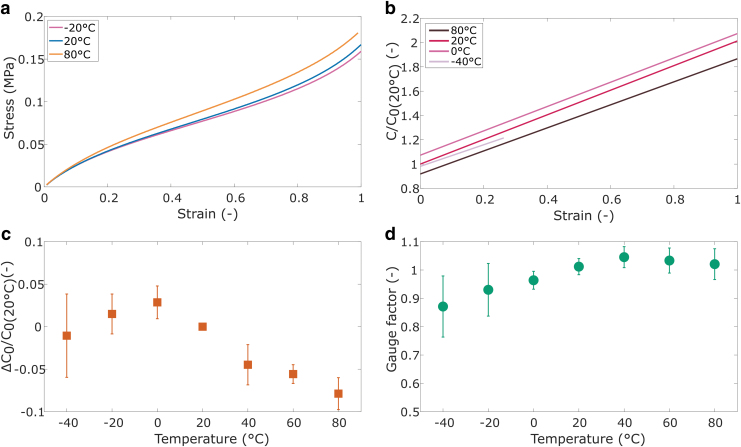
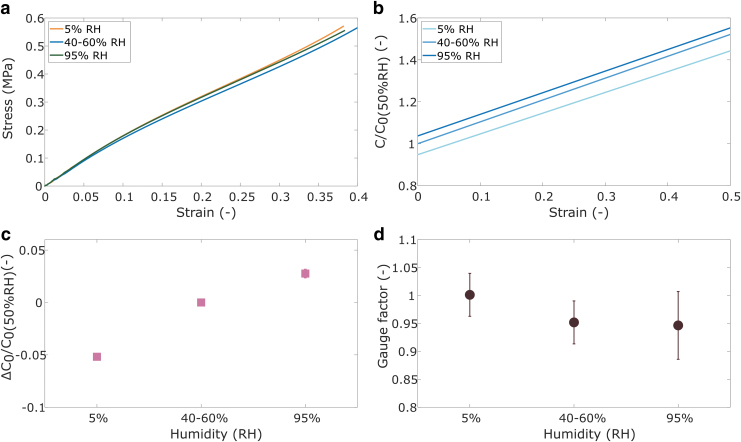
软机器人由于其对冲击的弹性、内含的智能以及适应不确定环境的潜在能力,预计在非结构化环境中运行良好。软机器人由于其重量轻且可压缩的结构,在太空和地外任务中受到了进一步的关注。迄今为止,文献中的大多数软机器人都是由弹性体制成的。然而,关于极端环境中常用弹性体的材料特性,现有数据有限。在本研究中,我们在-40°C至80°C的温度范围和5-95%RH的湿度范围内,对软机器人文献EcoFlex 00-30、Dragon Skin 10、Smooth Sil 950和Sylgard 184中常用的四种弹性体进行了表征。我们进行拉伸至失效、刚度和应力松弛测试。此外,我们对可拉伸电容传感器中使用的软弹性体进行了案例研究,以评估组成材料行为对组件性能的影响。我们发现,所有弹性体都表现出与温度相关的行为,材料具有典型的硬化性,并且随着温度的升高,失效时的应变较低。应力松弛对温度的响应取决于弹性体的类型。在不同的湿度条件下观察到有限的材料效应。电容式传感器的机械性能仅取决于温度,但测量的电容显示出与湿度和温度变化相关的变化,这表明需要在机械设计的同时考虑特定部件的性能。这项研究为软机器人在不同环境条件下的设计和成功操作提供了对弹性体行为的重要见解。
Characterization of Temperature and Humidity Dependence in Soft Elastomer Behavior.
Soft robots are predicted to operate well in unstructured environments due to their resilience to impacts, embodied intelligence, and potential ability to adapt to uncertain circumstances. Soft robots are of further interest for space and extraterrestrial missions, owing to their lightweight and compressible construction. Most soft robots in the literature to-date are made of elastomer bodies. However, limited data are available on the material characteristics of commonly used elastomers in extreme environments. In this study, we characterize four commonly used elastomers in the soft robotics literature-EcoFlex 00-30, Dragon Skin 10, Smooth-Sil 950, and Sylgard 184-in a temperature range of -40°C to 80°C and humidity range of 5-95% RH. We perform pull-to-failure, stiffness, and stress-relaxation tests. Furthermore, we perform a case study on soft elastomers used in stretchable capacitive sensors to evaluate the implications of the constituent material behavior on component performance. We find that all elastomers show temperature-dependent behavior, with typical stiffening of the material and a lower strain at failure with increasing temperature. The stress-relaxation response to temperature depends on the type of elastomer. Limited material effects are observed in response to different humidity conditions. The mechanical properties of the capacitive sensors are only dependent on temperature, but the measured capacitance shows changes related to both humidity and temperature changes, indicating that component-specific properties need to be considered in tandem with the mechanical design. This study provides essential insights into elastomer behavior for the design and successful operation of soft robots in varied environmental conditions.
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
