{"title":"形状记忆合金弹簧驱动柔性脊柱的壁虎仿生机器人。","authors":"Jiahui Qiu, Aihong Ji, Kongjun Zhu, Qinfei Han, Wei Wang, Qian Qi, Guangming Chen","doi":"10.1089/soro.2022.0080","DOIUrl":null,"url":null,"abstract":"The majority of sprawling-posture quadrupedal vertebrates, such as geckos and lizards, adopt a cyclical lateral swing pattern of their trunk that is coordinated with limb movements to provide extraordinary flexibility and mobility. Inspired by the gecko's locomotory gait and posture, a gecko-like robot with a flexible spine driven by shape memory alloy (SMA) springs was proposed in this work. The static parameters of the SMA spring were experimentally measured, and the flexible spine driven by SMA springs can be deflected bidirectionally. A kinematic model of the spine mechanism was established, and the mathematical relationship between the thermodynamic behavior of the SMA springs and spinal deflection was systematically analyzed. When a gecko trots with a lateral swing pattern of its trunk, the body and the spine show a standing wave shape and a single-peak C-type curve, respectively. The lateral spine deflection and trotting gait were combined in a collaborative model of a flexible spine and limbs to describe in detail the specific relationships between leg joint variables and spine deflection angle. Planar motion tests of a prototype robot were also conducted by using four high-speed cameras to record the trajectory of each point of the body, which verified the proposed model. From the acquired results, it was demonstrated that, compared with a rigid body, a robot with a flexible spine has a longer stride length, higher speed, and a greatly reduced turning radius.","PeriodicalId":48685,"journal":{"name":"Soft Robotics","volume":"10 4","pages":"713-723"},"PeriodicalIF":6.1000,"publicationDate":"2023-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10442688/pdf/","citationCount":"1","resultStr":"{\"title\":\"A Gecko-Inspired Robot with a Flexible Spine Driven by Shape Memory Alloy Springs.\",\"authors\":\"Jiahui Qiu, Aihong Ji, Kongjun Zhu, Qinfei Han, Wei Wang, Qian Qi, Guangming Chen\",\"doi\":\"10.1089/soro.2022.0080\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"The majority of sprawling-posture quadrupedal vertebrates, such as geckos and lizards, adopt a cyclical lateral swing pattern of their trunk that is coordinated with limb movements to provide extraordinary flexibility and mobility. Inspired by the gecko's locomotory gait and posture, a gecko-like robot with a flexible spine driven by shape memory alloy (SMA) springs was proposed in this work. The static parameters of the SMA spring were experimentally measured, and the flexible spine driven by SMA springs can be deflected bidirectionally. A kinematic model of the spine mechanism was established, and the mathematical relationship between the thermodynamic behavior of the SMA springs and spinal deflection was systematically analyzed. When a gecko trots with a lateral swing pattern of its trunk, the body and the spine show a standing wave shape and a single-peak C-type curve, respectively. The lateral spine deflection and trotting gait were combined in a collaborative model of a flexible spine and limbs to describe in detail the specific relationships between leg joint variables and spine deflection angle. Planar motion tests of a prototype robot were also conducted by using four high-speed cameras to record the trajectory of each point of the body, which verified the proposed model. From the acquired results, it was demonstrated that, compared with a rigid body, a robot with a flexible spine has a longer stride length, higher speed, and a greatly reduced turning radius.\",\"PeriodicalId\":48685,\"journal\":{\"name\":\"Soft Robotics\",\"volume\":\"10 4\",\"pages\":\"713-723\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2023-08-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10442688/pdf/\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Soft Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1089/soro.2022.0080\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1089/soro.2022.0080","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
A Gecko-Inspired Robot with a Flexible Spine Driven by Shape Memory Alloy Springs.
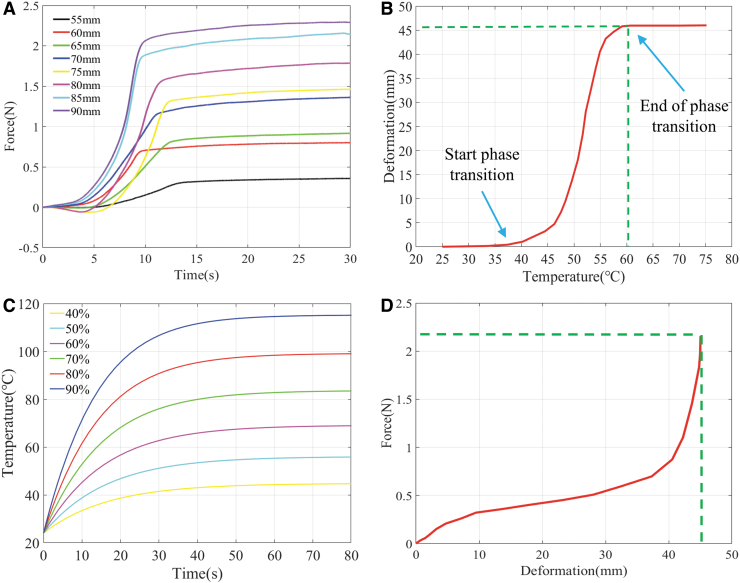
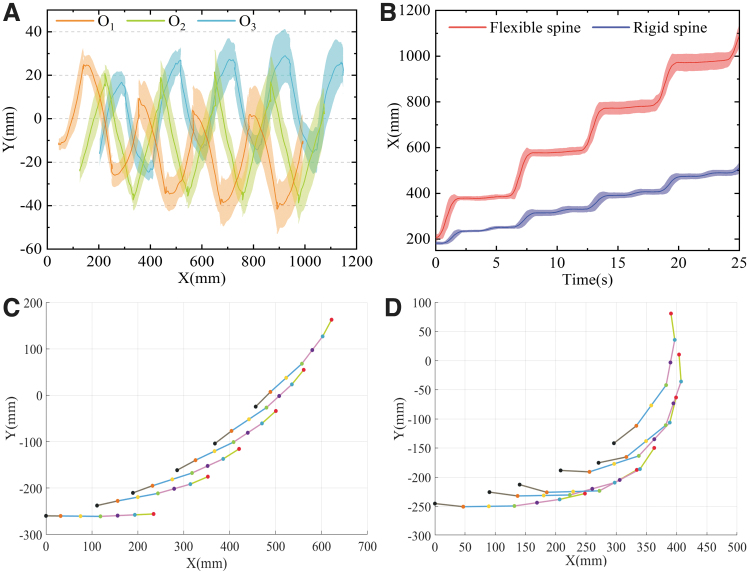
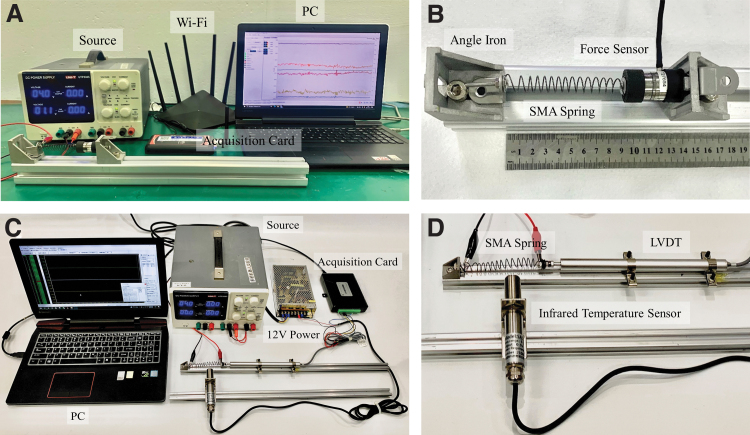
The majority of sprawling-posture quadrupedal vertebrates, such as geckos and lizards, adopt a cyclical lateral swing pattern of their trunk that is coordinated with limb movements to provide extraordinary flexibility and mobility. Inspired by the gecko's locomotory gait and posture, a gecko-like robot with a flexible spine driven by shape memory alloy (SMA) springs was proposed in this work. The static parameters of the SMA spring were experimentally measured, and the flexible spine driven by SMA springs can be deflected bidirectionally. A kinematic model of the spine mechanism was established, and the mathematical relationship between the thermodynamic behavior of the SMA springs and spinal deflection was systematically analyzed. When a gecko trots with a lateral swing pattern of its trunk, the body and the spine show a standing wave shape and a single-peak C-type curve, respectively. The lateral spine deflection and trotting gait were combined in a collaborative model of a flexible spine and limbs to describe in detail the specific relationships between leg joint variables and spine deflection angle. Planar motion tests of a prototype robot were also conducted by using four high-speed cameras to record the trajectory of each point of the body, which verified the proposed model. From the acquired results, it was demonstrated that, compared with a rigid body, a robot with a flexible spine has a longer stride length, higher speed, and a greatly reduced turning radius.
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
