{"title":"基于模型预测的车辆多目标自适应巡航鲁棒控制","authors":"Zibao Zhou, Juping Zhu, Yuansheng Li","doi":"10.1049/ccs.2020.0030","DOIUrl":null,"url":null,"abstract":"<div>\n <p>On the issue of low utilisation and acceptance of current adaptive cruise control (ACC), a multi-objective adaptive cruise control (MO-ACC) algorithm is developed in this study. Based on model predictive control theory, comprehensively considering the coordination among various conflicting objectives, the decision of desired longitudinal acceleration is transformed into online quadratic programming (QP) problem. In order to compensate for prediction error caused by modelling mismatch, the robustness of control system is improved by introducing an error feedback correction mechanism. Meanwhile, vector management method is adopted to deal with the non-feasible solution owing to hard constraints during the process of optimisation. Further, under different work conditions, the focusing performance index along with constraint space varies, and therefore different ACC modes are established to meet the demand of skilled driving groups by means of slightly adjusting performance index, constraint space as well as slack relaxation. The simulations show that under the combined work conditions of the preceding vehicle, the following vehicle can realise seamless switching among various working modes, and also is able to achieve the good expectation during vehicle following, which will help to enhance the adaptability of the ACC system to the complex road traffic environment.</p>\n </div>","PeriodicalId":33652,"journal":{"name":"Cognitive Computation and Systems","volume":"2 4","pages":"254-261"},"PeriodicalIF":1.3000,"publicationDate":"2020-11-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/ccs.2020.0030","citationCount":"0","resultStr":"{\"title\":\"Robust control of vehicle multi-target adaptive cruise based on model prediction\",\"authors\":\"Zibao Zhou, Juping Zhu, Yuansheng Li\",\"doi\":\"10.1049/ccs.2020.0030\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n <p>On the issue of low utilisation and acceptance of current adaptive cruise control (ACC), a multi-objective adaptive cruise control (MO-ACC) algorithm is developed in this study. Based on model predictive control theory, comprehensively considering the coordination among various conflicting objectives, the decision of desired longitudinal acceleration is transformed into online quadratic programming (QP) problem. In order to compensate for prediction error caused by modelling mismatch, the robustness of control system is improved by introducing an error feedback correction mechanism. Meanwhile, vector management method is adopted to deal with the non-feasible solution owing to hard constraints during the process of optimisation. Further, under different work conditions, the focusing performance index along with constraint space varies, and therefore different ACC modes are established to meet the demand of skilled driving groups by means of slightly adjusting performance index, constraint space as well as slack relaxation. The simulations show that under the combined work conditions of the preceding vehicle, the following vehicle can realise seamless switching among various working modes, and also is able to achieve the good expectation during vehicle following, which will help to enhance the adaptability of the ACC system to the complex road traffic environment.</p>\\n </div>\",\"PeriodicalId\":33652,\"journal\":{\"name\":\"Cognitive Computation and Systems\",\"volume\":\"2 4\",\"pages\":\"254-261\"},\"PeriodicalIF\":1.3000,\"publicationDate\":\"2020-11-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/ccs.2020.0030\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cognitive Computation and Systems\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/ccs.2020.0030\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cognitive Computation and Systems","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/ccs.2020.0030","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Robust control of vehicle multi-target adaptive cruise based on model prediction
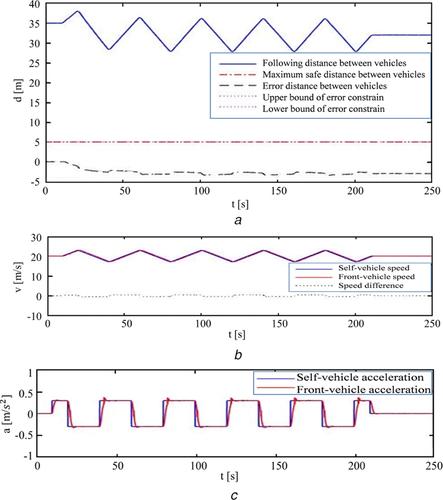
On the issue of low utilisation and acceptance of current adaptive cruise control (ACC), a multi-objective adaptive cruise control (MO-ACC) algorithm is developed in this study. Based on model predictive control theory, comprehensively considering the coordination among various conflicting objectives, the decision of desired longitudinal acceleration is transformed into online quadratic programming (QP) problem. In order to compensate for prediction error caused by modelling mismatch, the robustness of control system is improved by introducing an error feedback correction mechanism. Meanwhile, vector management method is adopted to deal with the non-feasible solution owing to hard constraints during the process of optimisation. Further, under different work conditions, the focusing performance index along with constraint space varies, and therefore different ACC modes are established to meet the demand of skilled driving groups by means of slightly adjusting performance index, constraint space as well as slack relaxation. The simulations show that under the combined work conditions of the preceding vehicle, the following vehicle can realise seamless switching among various working modes, and also is able to achieve the good expectation during vehicle following, which will help to enhance the adaptability of the ACC system to the complex road traffic environment.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
