Kevin Lin, Christopher Agia, Toki Migimatsu, Marco Pavone, Jeannette Bohg
{"title":"Text2Motion:从自然语言指令到可行的计划","authors":"Kevin Lin, Christopher Agia, Toki Migimatsu, Marco Pavone, Jeannette Bohg","doi":"10.1007/s10514-023-10131-7","DOIUrl":null,"url":null,"abstract":"<div><p>We propose Text2Motion, a language-based planning framework enabling robots to solve sequential manipulation tasks that require long-horizon reasoning. Given a natural language instruction, our framework constructs both a task- and motion-level plan that is verified to reach inferred symbolic goals. Text2Motion uses feasibility heuristics encoded in Q-functions of a library of skills to guide task planning with Large Language Models. Whereas previous language-based planners only consider the feasibility of individual skills, Text2Motion actively resolves geometric dependencies spanning skill sequences by performing geometric feasibility planning during its search. We evaluate our method on a suite of problems that require long-horizon reasoning, interpretation of abstract goals, and handling of partial affordance perception. Our experiments show that Text2Motion can solve these challenging problems with a success rate of 82%, while prior state-of-the-art language-based planning methods only achieve 13%. Text2Motion thus provides promising generalization characteristics to semantically diverse sequential manipulation tasks with geometric dependencies between skills. Qualitative results are made available at https://sites.google.com/stanford.edu/text2motion.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1345 - 1365"},"PeriodicalIF":4.3000,"publicationDate":"2023-11-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"73","resultStr":"{\"title\":\"Text2Motion: from natural language instructions to feasible plans\",\"authors\":\"Kevin Lin, Christopher Agia, Toki Migimatsu, Marco Pavone, Jeannette Bohg\",\"doi\":\"10.1007/s10514-023-10131-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>We propose Text2Motion, a language-based planning framework enabling robots to solve sequential manipulation tasks that require long-horizon reasoning. Given a natural language instruction, our framework constructs both a task- and motion-level plan that is verified to reach inferred symbolic goals. Text2Motion uses feasibility heuristics encoded in Q-functions of a library of skills to guide task planning with Large Language Models. Whereas previous language-based planners only consider the feasibility of individual skills, Text2Motion actively resolves geometric dependencies spanning skill sequences by performing geometric feasibility planning during its search. We evaluate our method on a suite of problems that require long-horizon reasoning, interpretation of abstract goals, and handling of partial affordance perception. Our experiments show that Text2Motion can solve these challenging problems with a success rate of 82%, while prior state-of-the-art language-based planning methods only achieve 13%. Text2Motion thus provides promising generalization characteristics to semantically diverse sequential manipulation tasks with geometric dependencies between skills. Qualitative results are made available at https://sites.google.com/stanford.edu/text2motion.\\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1345 - 1365\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-11-14\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"73\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10131-7\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10131-7","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Text2Motion: from natural language instructions to feasible plans
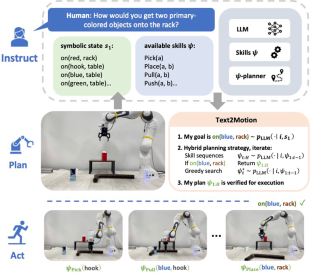
We propose Text2Motion, a language-based planning framework enabling robots to solve sequential manipulation tasks that require long-horizon reasoning. Given a natural language instruction, our framework constructs both a task- and motion-level plan that is verified to reach inferred symbolic goals. Text2Motion uses feasibility heuristics encoded in Q-functions of a library of skills to guide task planning with Large Language Models. Whereas previous language-based planners only consider the feasibility of individual skills, Text2Motion actively resolves geometric dependencies spanning skill sequences by performing geometric feasibility planning during its search. We evaluate our method on a suite of problems that require long-horizon reasoning, interpretation of abstract goals, and handling of partial affordance perception. Our experiments show that Text2Motion can solve these challenging problems with a success rate of 82%, while prior state-of-the-art language-based planning methods only achieve 13%. Text2Motion thus provides promising generalization characteristics to semantically diverse sequential manipulation tasks with geometric dependencies between skills. Qualitative results are made available at https://sites.google.com/stanford.edu/text2motion.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
