Tara Boroushaki, Laura Dodds, Nazish Naeem, Fadel Adib
{"title":"FuseBot:通过多模态感知对刚性和可变形物体进行机械搜索","authors":"Tara Boroushaki, Laura Dodds, Nazish Naeem, Fadel Adib","doi":"10.1007/s10514-023-10137-1","DOIUrl":null,"url":null,"abstract":"<div><p>Mechanical search is a robotic problem where a robot needs to retrieve a target item that is partially or fully-occluded from its camera. State-of-the-art approaches for mechanical search either require an expensive search process to find the target item, or they require the item to be tagged with a radio frequency identification tag (e.g., RFID), making their approach beneficial only to tagged items in the environment. We present FuseBot, the first robotic system for RF-Visual mechanical search that enables efficient retrieval of both RF-tagged and untagged items in a pile. Rather than requiring all target items in a pile to be RF-tagged, FuseBot leverages the mere existence of an RF-tagged item in the pile to benefit both tagged and untagged items. Our design introduces two key innovations. The first is <i>RF-Visual Mapping</i>, a technique that identifies and locates RF-tagged items in a pile and uses this information to construct an RF-Visual occupancy distribution map. The second is <i>RF-Visual Extraction</i>, a policy formulated as an optimization problem that minimizes the number of actions required to extract the target object by accounting for the probabilistic occupancy distribution, the expected grasp quality, and the expected information gain from future actions. We built a real-time end-to-end prototype of our system on a UR5e robotic arm with in-hand vision and RF perception modules. We conducted over 200 real-world experimental trials to evaluate FuseBot and compare its performance to a state-of-the-art vision-based system named X-Ray (Danielczuk et al., in: 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS), IEEE, 2020). Our experimental results demonstrate that FuseBot outperforms X-Ray’s efficiency by more than 40% in terms of the number of actions required for successful mechanical search. Furthermore, in comparison to X-Ray’s success rate of 84%, FuseBot achieves a success rate of 95% in retrieving untagged items, demonstrating for the first time that the benefits of RF perception extend beyond tagged objects in the mechanical search problem.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1137 - 1154"},"PeriodicalIF":4.3000,"publicationDate":"2023-09-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10137-1.pdf","citationCount":"1","resultStr":"{\"title\":\"FuseBot: mechanical search of rigid and deformable objects via multi-modal perception\",\"authors\":\"Tara Boroushaki, Laura Dodds, Nazish Naeem, Fadel Adib\",\"doi\":\"10.1007/s10514-023-10137-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Mechanical search is a robotic problem where a robot needs to retrieve a target item that is partially or fully-occluded from its camera. State-of-the-art approaches for mechanical search either require an expensive search process to find the target item, or they require the item to be tagged with a radio frequency identification tag (e.g., RFID), making their approach beneficial only to tagged items in the environment. We present FuseBot, the first robotic system for RF-Visual mechanical search that enables efficient retrieval of both RF-tagged and untagged items in a pile. Rather than requiring all target items in a pile to be RF-tagged, FuseBot leverages the mere existence of an RF-tagged item in the pile to benefit both tagged and untagged items. Our design introduces two key innovations. The first is <i>RF-Visual Mapping</i>, a technique that identifies and locates RF-tagged items in a pile and uses this information to construct an RF-Visual occupancy distribution map. The second is <i>RF-Visual Extraction</i>, a policy formulated as an optimization problem that minimizes the number of actions required to extract the target object by accounting for the probabilistic occupancy distribution, the expected grasp quality, and the expected information gain from future actions. We built a real-time end-to-end prototype of our system on a UR5e robotic arm with in-hand vision and RF perception modules. We conducted over 200 real-world experimental trials to evaluate FuseBot and compare its performance to a state-of-the-art vision-based system named X-Ray (Danielczuk et al., in: 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS), IEEE, 2020). Our experimental results demonstrate that FuseBot outperforms X-Ray’s efficiency by more than 40% in terms of the number of actions required for successful mechanical search. Furthermore, in comparison to X-Ray’s success rate of 84%, FuseBot achieves a success rate of 95% in retrieving untagged items, demonstrating for the first time that the benefits of RF perception extend beyond tagged objects in the mechanical search problem.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1137 - 1154\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-09-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10137-1.pdf\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10137-1\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10137-1","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
FuseBot: mechanical search of rigid and deformable objects via multi-modal perception
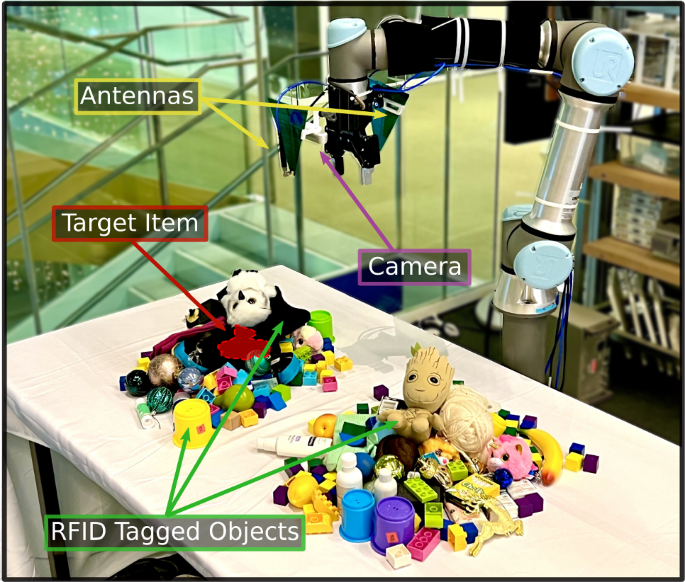
Mechanical search is a robotic problem where a robot needs to retrieve a target item that is partially or fully-occluded from its camera. State-of-the-art approaches for mechanical search either require an expensive search process to find the target item, or they require the item to be tagged with a radio frequency identification tag (e.g., RFID), making their approach beneficial only to tagged items in the environment. We present FuseBot, the first robotic system for RF-Visual mechanical search that enables efficient retrieval of both RF-tagged and untagged items in a pile. Rather than requiring all target items in a pile to be RF-tagged, FuseBot leverages the mere existence of an RF-tagged item in the pile to benefit both tagged and untagged items. Our design introduces two key innovations. The first is RF-Visual Mapping, a technique that identifies and locates RF-tagged items in a pile and uses this information to construct an RF-Visual occupancy distribution map. The second is RF-Visual Extraction, a policy formulated as an optimization problem that minimizes the number of actions required to extract the target object by accounting for the probabilistic occupancy distribution, the expected grasp quality, and the expected information gain from future actions. We built a real-time end-to-end prototype of our system on a UR5e robotic arm with in-hand vision and RF perception modules. We conducted over 200 real-world experimental trials to evaluate FuseBot and compare its performance to a state-of-the-art vision-based system named X-Ray (Danielczuk et al., in: 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS), IEEE, 2020). Our experimental results demonstrate that FuseBot outperforms X-Ray’s efficiency by more than 40% in terms of the number of actions required for successful mechanical search. Furthermore, in comparison to X-Ray’s success rate of 84%, FuseBot achieves a success rate of 95% in retrieving untagged items, demonstrating for the first time that the benefits of RF perception extend beyond tagged objects in the mechanical search problem.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
