Hejia Zhang, Shao-Hung Chan, Jie Zhong, Jiaoyang Li, Peter Kolapo, Sven Koenig, Zach Agioutantis, Steven Schafrik, Stefanos Nikolaidis
{"title":"多机器人协同操作任务的几何任务与运动规划","authors":"Hejia Zhang, Shao-Hung Chan, Jie Zhong, Jiaoyang Li, Peter Kolapo, Sven Koenig, Zach Agioutantis, Steven Schafrik, Stefanos Nikolaidis","doi":"10.1007/s10514-023-10148-y","DOIUrl":null,"url":null,"abstract":"<div><p>We address multi-robot geometric task-and-motion planning (MR-GTAMP) problems in <i>synchronous</i>, <i>monotone</i> setups. The goal of the MR-GTAMP problem is to move objects with multiple robots to goal regions in the presence of other movable objects. We focus on collaborative manipulation tasks where the robots have to adopt intelligent collaboration strategies to be successful and effective, i.e., decide which robot should move which objects to which positions, and perform collaborative actions, such as handovers. To endow robots with these collaboration capabilities, we propose to first collect occlusion and reachability information for each robot by calling motion-planning algorithms. We then propose a method that uses the collected information to build a graph structure which captures the precedence of the manipulations of different objects and supports the implementation of a mixed-integer program to guide the search for highly effective collaborative task-and-motion plans. The search process for collaborative task-and-motion plans is based on a Monte-Carlo Tree Search (MCTS) exploration strategy to achieve exploration-exploitation balance. We evaluate our framework in two challenging MR-GTAMP domains and show that it outperforms two state-of-the-art baselines with respect to the planning time, the resulting plan length and the number of objects moved. We also show that our framework can be applied to underground mining operations where a robotic arm needs to coordinate with an autonomous roof bolter. We demonstrate plan execution in two roof-bolting scenarios both in simulation and on robots.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1537 - 1558"},"PeriodicalIF":4.3000,"publicationDate":"2023-10-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10148-y.pdf","citationCount":"0","resultStr":"{\"title\":\"Multi-robot geometric task-and-motion planning for collaborative manipulation tasks\",\"authors\":\"Hejia Zhang, Shao-Hung Chan, Jie Zhong, Jiaoyang Li, Peter Kolapo, Sven Koenig, Zach Agioutantis, Steven Schafrik, Stefanos Nikolaidis\",\"doi\":\"10.1007/s10514-023-10148-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>We address multi-robot geometric task-and-motion planning (MR-GTAMP) problems in <i>synchronous</i>, <i>monotone</i> setups. The goal of the MR-GTAMP problem is to move objects with multiple robots to goal regions in the presence of other movable objects. We focus on collaborative manipulation tasks where the robots have to adopt intelligent collaboration strategies to be successful and effective, i.e., decide which robot should move which objects to which positions, and perform collaborative actions, such as handovers. To endow robots with these collaboration capabilities, we propose to first collect occlusion and reachability information for each robot by calling motion-planning algorithms. We then propose a method that uses the collected information to build a graph structure which captures the precedence of the manipulations of different objects and supports the implementation of a mixed-integer program to guide the search for highly effective collaborative task-and-motion plans. The search process for collaborative task-and-motion plans is based on a Monte-Carlo Tree Search (MCTS) exploration strategy to achieve exploration-exploitation balance. We evaluate our framework in two challenging MR-GTAMP domains and show that it outperforms two state-of-the-art baselines with respect to the planning time, the resulting plan length and the number of objects moved. We also show that our framework can be applied to underground mining operations where a robotic arm needs to coordinate with an autonomous roof bolter. We demonstrate plan execution in two roof-bolting scenarios both in simulation and on robots.\\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1537 - 1558\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-10-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10148-y.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10148-y\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10148-y","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Multi-robot geometric task-and-motion planning for collaborative manipulation tasks
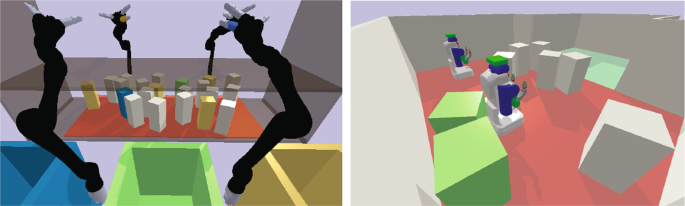
We address multi-robot geometric task-and-motion planning (MR-GTAMP) problems in synchronous, monotone setups. The goal of the MR-GTAMP problem is to move objects with multiple robots to goal regions in the presence of other movable objects. We focus on collaborative manipulation tasks where the robots have to adopt intelligent collaboration strategies to be successful and effective, i.e., decide which robot should move which objects to which positions, and perform collaborative actions, such as handovers. To endow robots with these collaboration capabilities, we propose to first collect occlusion and reachability information for each robot by calling motion-planning algorithms. We then propose a method that uses the collected information to build a graph structure which captures the precedence of the manipulations of different objects and supports the implementation of a mixed-integer program to guide the search for highly effective collaborative task-and-motion plans. The search process for collaborative task-and-motion plans is based on a Monte-Carlo Tree Search (MCTS) exploration strategy to achieve exploration-exploitation balance. We evaluate our framework in two challenging MR-GTAMP domains and show that it outperforms two state-of-the-art baselines with respect to the planning time, the resulting plan length and the number of objects moved. We also show that our framework can be applied to underground mining operations where a robotic arm needs to coordinate with an autonomous roof bolter. We demonstrate plan execution in two roof-bolting scenarios both in simulation and on robots.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
