{"title":"神经网络感受野对单眼深度和自我运动估计的影响","authors":"S. A. Linok, D. A. Yudin","doi":"10.3103/S1060992X23060103","DOIUrl":null,"url":null,"abstract":"<p>We present an analysis of a self-supervised learning approach for monocular depth and ego-motion estimation. This is an important problem for computer vision systems of robots, autonomous vehicles and other intelligent agents, equipped only with monocular camera sensor. We have explored a number of neural network architectures that perform single-frame depth and multi-frame camera pose predictions to minimize photometric error between consecutive frames on a sequence of camera images. Unlike other existing works, our proposed approach called ERF-SfMLearner examines the influence of the deep neural network receptive field on the performance of depth and ego-motion estimation. To do this, we study the modification of network layers with two convolution operators with extended receptive field: dilated and deformable convolutions. We demonstrate on the KITTI dataset that increasing the receptive field leads to better metrics and lower errors both in terms of depth and ego-motion estimation. Code is publicly available at github.com/linukc/ERF-SfMLearner.</p>","PeriodicalId":721,"journal":{"name":"Optical Memory and Neural Networks","volume":"32 2","pages":"S206 - S213"},"PeriodicalIF":0.8000,"publicationDate":"2023-11-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.3103/S1060992X23060103.pdf","citationCount":"0","resultStr":"{\"title\":\"Influence of Neural Network Receptive Field on Monocular Depth and Ego-Motion Estimation\",\"authors\":\"S. A. Linok, D. A. Yudin\",\"doi\":\"10.3103/S1060992X23060103\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>We present an analysis of a self-supervised learning approach for monocular depth and ego-motion estimation. This is an important problem for computer vision systems of robots, autonomous vehicles and other intelligent agents, equipped only with monocular camera sensor. We have explored a number of neural network architectures that perform single-frame depth and multi-frame camera pose predictions to minimize photometric error between consecutive frames on a sequence of camera images. Unlike other existing works, our proposed approach called ERF-SfMLearner examines the influence of the deep neural network receptive field on the performance of depth and ego-motion estimation. To do this, we study the modification of network layers with two convolution operators with extended receptive field: dilated and deformable convolutions. We demonstrate on the KITTI dataset that increasing the receptive field leads to better metrics and lower errors both in terms of depth and ego-motion estimation. Code is publicly available at github.com/linukc/ERF-SfMLearner.</p>\",\"PeriodicalId\":721,\"journal\":{\"name\":\"Optical Memory and Neural Networks\",\"volume\":\"32 2\",\"pages\":\"S206 - S213\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2023-11-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.3103/S1060992X23060103.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Optical Memory and Neural Networks\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.3103/S1060992X23060103\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"OPTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Optical Memory and Neural Networks","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S1060992X23060103","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"OPTICS","Score":null,"Total":0}
Influence of Neural Network Receptive Field on Monocular Depth and Ego-Motion Estimation
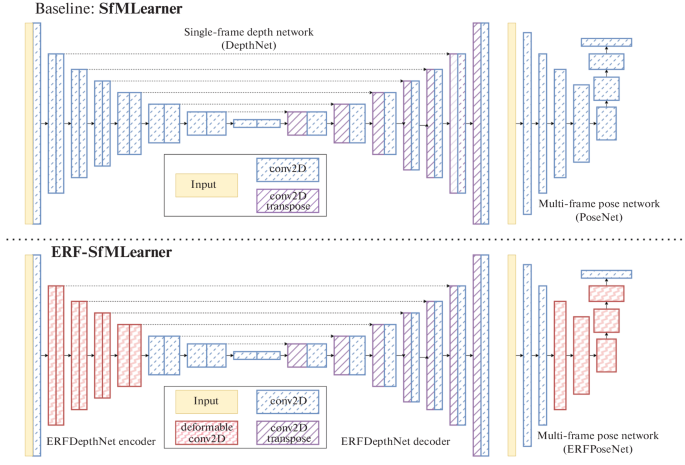
We present an analysis of a self-supervised learning approach for monocular depth and ego-motion estimation. This is an important problem for computer vision systems of robots, autonomous vehicles and other intelligent agents, equipped only with monocular camera sensor. We have explored a number of neural network architectures that perform single-frame depth and multi-frame camera pose predictions to minimize photometric error between consecutive frames on a sequence of camera images. Unlike other existing works, our proposed approach called ERF-SfMLearner examines the influence of the deep neural network receptive field on the performance of depth and ego-motion estimation. To do this, we study the modification of network layers with two convolution operators with extended receptive field: dilated and deformable convolutions. We demonstrate on the KITTI dataset that increasing the receptive field leads to better metrics and lower errors both in terms of depth and ego-motion estimation. Code is publicly available at github.com/linukc/ERF-SfMLearner.
期刊介绍:
The journal covers a wide range of issues in information optics such as optical memory, mechanisms for optical data recording and processing, photosensitive materials, optical, optoelectronic and holographic nanostructures, and many other related topics. Papers on memory systems using holographic and biological structures and concepts of brain operation are also included. The journal pays particular attention to research in the field of neural net systems that may lead to a new generation of computional technologies by endowing them with intelligence.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
