V. A. Glazunov, P. A. Laryushkin, K. A. Shalyukhin
{"title":"具有远程旋转中心的平行机械手的结构、运动学和原型设计","authors":"V. A. Glazunov, P. A. Laryushkin, K. A. Shalyukhin","doi":"10.1134/S1052618823060080","DOIUrl":null,"url":null,"abstract":"<p>A mechanism with a remote center of rotation, intended for use in medicine, and in particular, minimally invasive operations, is discussed. The basic mechanism consists of two parallelograms with common links, which allows the surgical instrument to duplicate the movement of the drive link of the mechanism. To ensure greater rigidity of the mechanism, it is proposed to introduce drive redundancy through the use of an additional RRR dyad with a drive pair. The position problem has been solved for the resulting mechanism. A 3D model and a prototype of the mechanism have been also presented.</p>","PeriodicalId":642,"journal":{"name":"Journal of Machinery Manufacture and Reliability","volume":"52 6","pages":"585 - 591"},"PeriodicalIF":0.4000,"publicationDate":"2023-12-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1134/S1052618823060080.pdf","citationCount":"0","resultStr":"{\"title\":\"Structure, Kinematics, and Prototyping of a Parallel Manipulator with a Remote Center of Rotation\",\"authors\":\"V. A. Glazunov, P. A. Laryushkin, K. A. Shalyukhin\",\"doi\":\"10.1134/S1052618823060080\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>A mechanism with a remote center of rotation, intended for use in medicine, and in particular, minimally invasive operations, is discussed. The basic mechanism consists of two parallelograms with common links, which allows the surgical instrument to duplicate the movement of the drive link of the mechanism. To ensure greater rigidity of the mechanism, it is proposed to introduce drive redundancy through the use of an additional RRR dyad with a drive pair. The position problem has been solved for the resulting mechanism. A 3D model and a prototype of the mechanism have been also presented.</p>\",\"PeriodicalId\":642,\"journal\":{\"name\":\"Journal of Machinery Manufacture and Reliability\",\"volume\":\"52 6\",\"pages\":\"585 - 591\"},\"PeriodicalIF\":0.4000,\"publicationDate\":\"2023-12-18\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1134/S1052618823060080.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Machinery Manufacture and Reliability\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S1052618823060080\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Machinery Manufacture and Reliability","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1134/S1052618823060080","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
Structure, Kinematics, and Prototyping of a Parallel Manipulator with a Remote Center of Rotation
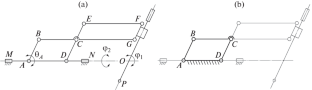
A mechanism with a remote center of rotation, intended for use in medicine, and in particular, minimally invasive operations, is discussed. The basic mechanism consists of two parallelograms with common links, which allows the surgical instrument to duplicate the movement of the drive link of the mechanism. To ensure greater rigidity of the mechanism, it is proposed to introduce drive redundancy through the use of an additional RRR dyad with a drive pair. The position problem has been solved for the resulting mechanism. A 3D model and a prototype of the mechanism have been also presented.
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
