{"title":"基于目标检测误差的自动驾驶汽车安全分析","authors":"Donglei Rong, Sheng Jin, Bokun Liu, Wenbin Yao","doi":"10.1049/itr2.12480","DOIUrl":null,"url":null,"abstract":"<p>Connected and automated vehicles (CAVs) rely on their perception systems to detect traffic objects, with the uncertainty in detection results significantly influencing the safety of their decision-making and control mechanisms. This paper introduces a safety potential field for CAVs that accounts for target detection errors. Initially, the paper categorizes errors arising from target detection into classification, labelling, and positioning categories. Subsequently, an elliptical model-based safety potential field is developed, incorporating potential field line optimization using safety thresholds and lane lines. This approach facilitates the determination of critical values and safety distribution for the potential field. The paper then proceeds with coefficient calibration and experimental analysis to validate the reliability of the proposed model. Findings indicate that as target detection errors increasingly manifest, the safety potential field area for CAVs becomes more restrictive, enhancing the field's sensitivity to these errors. The critical safety value for CAVs is maintained within the range of [0 m, 7 m], providing a stable basis for decision-making and control. Additionally, the safety value for CAVs falls between [15, 25], favouring the improvement of safety gradient distribution under the calibrated safety potential field values.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 5","pages":"932-948"},"PeriodicalIF":2.3000,"publicationDate":"2024-01-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12480","citationCount":"0","resultStr":"{\"title\":\"Safety analysis of autonomous vehicles based on target detection error\",\"authors\":\"Donglei Rong, Sheng Jin, Bokun Liu, Wenbin Yao\",\"doi\":\"10.1049/itr2.12480\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Connected and automated vehicles (CAVs) rely on their perception systems to detect traffic objects, with the uncertainty in detection results significantly influencing the safety of their decision-making and control mechanisms. This paper introduces a safety potential field for CAVs that accounts for target detection errors. Initially, the paper categorizes errors arising from target detection into classification, labelling, and positioning categories. Subsequently, an elliptical model-based safety potential field is developed, incorporating potential field line optimization using safety thresholds and lane lines. This approach facilitates the determination of critical values and safety distribution for the potential field. The paper then proceeds with coefficient calibration and experimental analysis to validate the reliability of the proposed model. Findings indicate that as target detection errors increasingly manifest, the safety potential field area for CAVs becomes more restrictive, enhancing the field's sensitivity to these errors. The critical safety value for CAVs is maintained within the range of [0 m, 7 m], providing a stable basis for decision-making and control. Additionally, the safety value for CAVs falls between [15, 25], favouring the improvement of safety gradient distribution under the calibrated safety potential field values.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 5\",\"pages\":\"932-948\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-01-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12480\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12480\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12480","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Safety analysis of autonomous vehicles based on target detection error
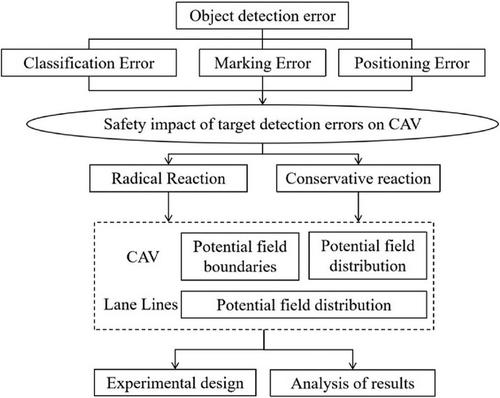
Connected and automated vehicles (CAVs) rely on their perception systems to detect traffic objects, with the uncertainty in detection results significantly influencing the safety of their decision-making and control mechanisms. This paper introduces a safety potential field for CAVs that accounts for target detection errors. Initially, the paper categorizes errors arising from target detection into classification, labelling, and positioning categories. Subsequently, an elliptical model-based safety potential field is developed, incorporating potential field line optimization using safety thresholds and lane lines. This approach facilitates the determination of critical values and safety distribution for the potential field. The paper then proceeds with coefficient calibration and experimental analysis to validate the reliability of the proposed model. Findings indicate that as target detection errors increasingly manifest, the safety potential field area for CAVs becomes more restrictive, enhancing the field's sensitivity to these errors. The critical safety value for CAVs is maintained within the range of [0 m, 7 m], providing a stable basis for decision-making and control. Additionally, the safety value for CAVs falls between [15, 25], favouring the improvement of safety gradient distribution under the calibrated safety potential field values.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
