Baudouin Saintyves, Matthew Spenko, Heinrich M. Jaeger
{"title":"利用固态和液态类似集体状态的自组织机器人集合体。","authors":"Baudouin Saintyves, Matthew Spenko, Heinrich M. Jaeger","doi":"10.1126/scirobotics.adh4130","DOIUrl":null,"url":null,"abstract":"<div >Designing robotic systems that can change their physical form factor as well as their compliance to adapt to environmental constraints remains a major conceptual and technical challenge. To address this, we introduce the Granulobot, a modular system that blurs the distinction between soft, modular, and swarm robotics. The system consists of gear-like units that each contain a single actuator such that units can self-assemble into larger, granular aggregates using magnetic coupling. These aggregates can reconfigure dynamically and also split into subsystems that might later recombine. Aggregates can self-organize into collective states with solid- and liquid-like properties, thus displaying widely differing compliance. These states can be perturbed locally via actuators or externally via mechanical feedback from the environment to produce adaptive shape-shifting in a decentralized manner. This, in turn, can generate locomotion strategies adapted to different conditions. Aggregates can move over obstacles without using external sensors or coordinates to maintain a steady gait over different surfaces without electronic communication among units. The modular design highlights a physical, morphological form of control that advances the development of resilient robotic systems with the ability to morph and adapt to different functions and conditions.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 86","pages":""},"PeriodicalIF":26.1000,"publicationDate":"2024-01-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adh4130","citationCount":"0","resultStr":"{\"title\":\"A self-organizing robotic aggregate using solid and liquid-like collective states\",\"authors\":\"Baudouin Saintyves, Matthew Spenko, Heinrich M. Jaeger\",\"doi\":\"10.1126/scirobotics.adh4130\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div >Designing robotic systems that can change their physical form factor as well as their compliance to adapt to environmental constraints remains a major conceptual and technical challenge. To address this, we introduce the Granulobot, a modular system that blurs the distinction between soft, modular, and swarm robotics. The system consists of gear-like units that each contain a single actuator such that units can self-assemble into larger, granular aggregates using magnetic coupling. These aggregates can reconfigure dynamically and also split into subsystems that might later recombine. Aggregates can self-organize into collective states with solid- and liquid-like properties, thus displaying widely differing compliance. These states can be perturbed locally via actuators or externally via mechanical feedback from the environment to produce adaptive shape-shifting in a decentralized manner. This, in turn, can generate locomotion strategies adapted to different conditions. Aggregates can move over obstacles without using external sensors or coordinates to maintain a steady gait over different surfaces without electronic communication among units. The modular design highlights a physical, morphological form of control that advances the development of resilient robotic systems with the ability to morph and adapt to different functions and conditions.</div>\",\"PeriodicalId\":56029,\"journal\":{\"name\":\"Science Robotics\",\"volume\":\"9 86\",\"pages\":\"\"},\"PeriodicalIF\":26.1000,\"publicationDate\":\"2024-01-24\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.science.org/doi/reader/10.1126/scirobotics.adh4130\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Science Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.science.org/doi/10.1126/scirobotics.adh4130\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adh4130","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
A self-organizing robotic aggregate using solid and liquid-like collective states
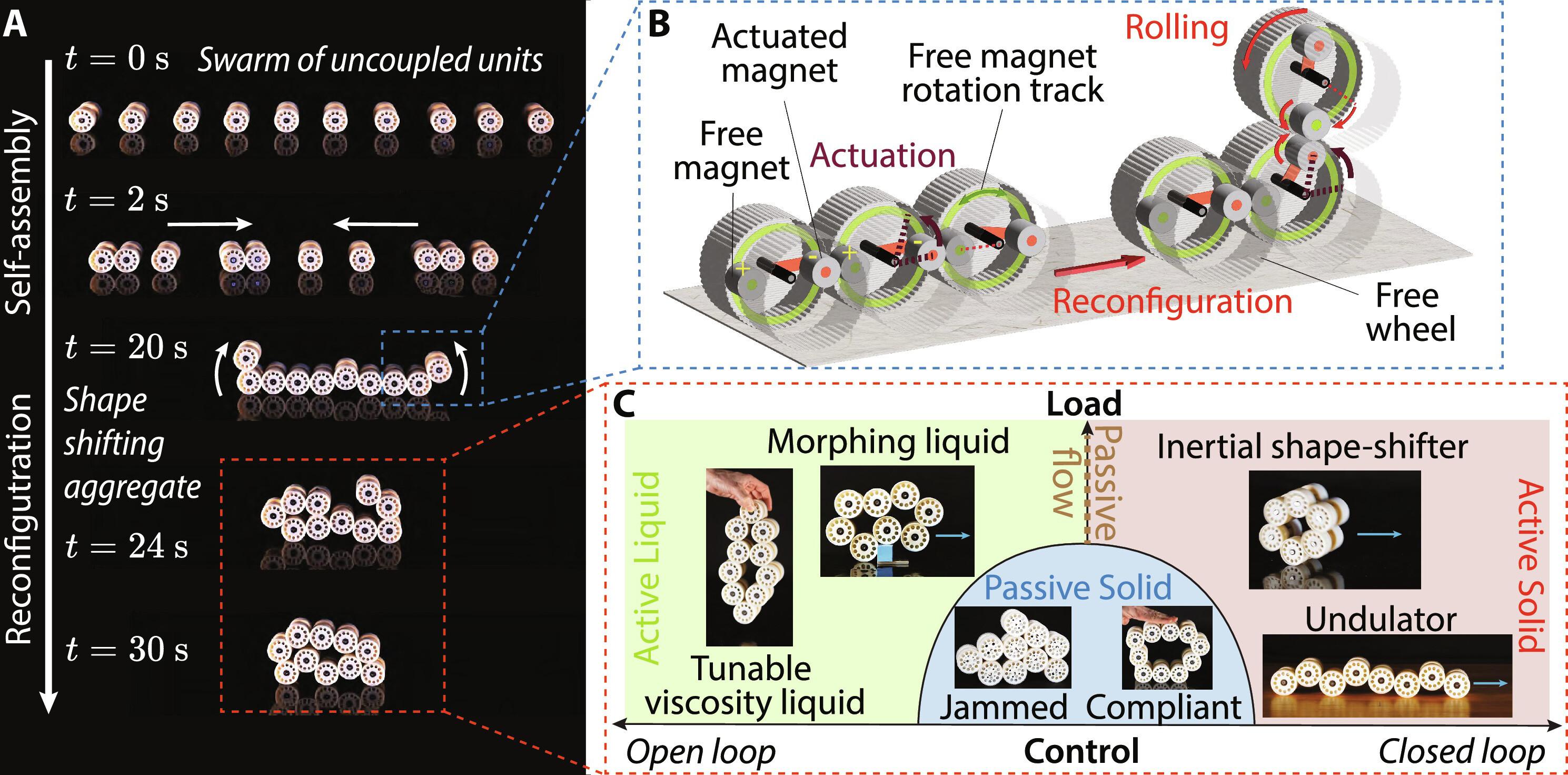
Designing robotic systems that can change their physical form factor as well as their compliance to adapt to environmental constraints remains a major conceptual and technical challenge. To address this, we introduce the Granulobot, a modular system that blurs the distinction between soft, modular, and swarm robotics. The system consists of gear-like units that each contain a single actuator such that units can self-assemble into larger, granular aggregates using magnetic coupling. These aggregates can reconfigure dynamically and also split into subsystems that might later recombine. Aggregates can self-organize into collective states with solid- and liquid-like properties, thus displaying widely differing compliance. These states can be perturbed locally via actuators or externally via mechanical feedback from the environment to produce adaptive shape-shifting in a decentralized manner. This, in turn, can generate locomotion strategies adapted to different conditions. Aggregates can move over obstacles without using external sensors or coordinates to maintain a steady gait over different surfaces without electronic communication among units. The modular design highlights a physical, morphological form of control that advances the development of resilient robotic systems with the ability to morph and adapt to different functions and conditions.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
