Stefano Dafarra, Ugo Pattacini, Giulio Romualdi, Lorenzo Rapetti, Riccardo Grieco, Kourosh Darvish, Gianluca Milani, Enrico Valli, Ines Sorrentino, Paolo Maria Viceconte, Alessandro Scalzo, Silvio Traversaro, Carlotta Sartore, Mohamed Elobaid, Nuno Guedelha, Connor Herron, Alexander Leonessa, Francesco Draicchio, Giorgio Metta, Marco Maggiali, Daniele Pucci
{"title":"iCub3 化身系统:实现仿人机器人的远程全沉浸式化身。","authors":"Stefano Dafarra, Ugo Pattacini, Giulio Romualdi, Lorenzo Rapetti, Riccardo Grieco, Kourosh Darvish, Gianluca Milani, Enrico Valli, Ines Sorrentino, Paolo Maria Viceconte, Alessandro Scalzo, Silvio Traversaro, Carlotta Sartore, Mohamed Elobaid, Nuno Guedelha, Connor Herron, Alexander Leonessa, Francesco Draicchio, Giorgio Metta, Marco Maggiali, Daniele Pucci","doi":"10.1126/scirobotics.adh3834","DOIUrl":null,"url":null,"abstract":"<div >We present an avatar system designed to facilitate the embodiment of humanoid robots by human operators, validated through iCub3, a humanoid developed at the Istituto Italiano di Tecnologia. More precisely, the paper makes two contributions: First, we present the humanoid iCub3 as a robotic avatar that integrates the latest significant improvements after about 15 years of development of the iCub series. Second, we present a versatile avatar system enabling humans to embody humanoid robots encompassing aspects such as locomotion, manipulation, voice, and facial expressions with comprehensive sensory feedback including visual, auditory, haptic, weight, and touch modalities. We validated the system by implementing several avatar architecture instances, each tailored to specific requirements. First, we evaluated the optimized architecture for verbal, nonverbal, and physical interactions with a remote recipient. This testing involved the operator in Genoa and the avatar in the Biennale di Venezia, Venice—about 290 kilometers away—thus allowing the operator to visit the Italian art exhibition remotely. Second, we evaluated the optimized architecture for recipient physical collaboration and public engagement on stage, live, at the We Make Future show, a prominent world digital innovation festival. In this instance, the operator was situated in Genoa while the avatar operated in Rimini—about 300 kilometers away—interacting with a recipient who entrusted the avatar with a payload to carry on stage before an audience of approximately 2000 spectators. Third, we present the architecture implemented by the iCub Team for the All Nippon Airways (ANA) Avatar XPrize competition.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 86","pages":""},"PeriodicalIF":26.1000,"publicationDate":"2024-01-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adh3834","citationCount":"0","resultStr":"{\"title\":\"iCub3 avatar system: Enabling remote fully immersive embodiment of humanoid robots\",\"authors\":\"Stefano Dafarra, Ugo Pattacini, Giulio Romualdi, Lorenzo Rapetti, Riccardo Grieco, Kourosh Darvish, Gianluca Milani, Enrico Valli, Ines Sorrentino, Paolo Maria Viceconte, Alessandro Scalzo, Silvio Traversaro, Carlotta Sartore, Mohamed Elobaid, Nuno Guedelha, Connor Herron, Alexander Leonessa, Francesco Draicchio, Giorgio Metta, Marco Maggiali, Daniele Pucci\",\"doi\":\"10.1126/scirobotics.adh3834\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div >We present an avatar system designed to facilitate the embodiment of humanoid robots by human operators, validated through iCub3, a humanoid developed at the Istituto Italiano di Tecnologia. More precisely, the paper makes two contributions: First, we present the humanoid iCub3 as a robotic avatar that integrates the latest significant improvements after about 15 years of development of the iCub series. Second, we present a versatile avatar system enabling humans to embody humanoid robots encompassing aspects such as locomotion, manipulation, voice, and facial expressions with comprehensive sensory feedback including visual, auditory, haptic, weight, and touch modalities. We validated the system by implementing several avatar architecture instances, each tailored to specific requirements. First, we evaluated the optimized architecture for verbal, nonverbal, and physical interactions with a remote recipient. This testing involved the operator in Genoa and the avatar in the Biennale di Venezia, Venice—about 290 kilometers away—thus allowing the operator to visit the Italian art exhibition remotely. Second, we evaluated the optimized architecture for recipient physical collaboration and public engagement on stage, live, at the We Make Future show, a prominent world digital innovation festival. In this instance, the operator was situated in Genoa while the avatar operated in Rimini—about 300 kilometers away—interacting with a recipient who entrusted the avatar with a payload to carry on stage before an audience of approximately 2000 spectators. Third, we present the architecture implemented by the iCub Team for the All Nippon Airways (ANA) Avatar XPrize competition.</div>\",\"PeriodicalId\":56029,\"journal\":{\"name\":\"Science Robotics\",\"volume\":\"9 86\",\"pages\":\"\"},\"PeriodicalIF\":26.1000,\"publicationDate\":\"2024-01-24\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.science.org/doi/reader/10.1126/scirobotics.adh3834\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Science Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.science.org/doi/10.1126/scirobotics.adh3834\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adh3834","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
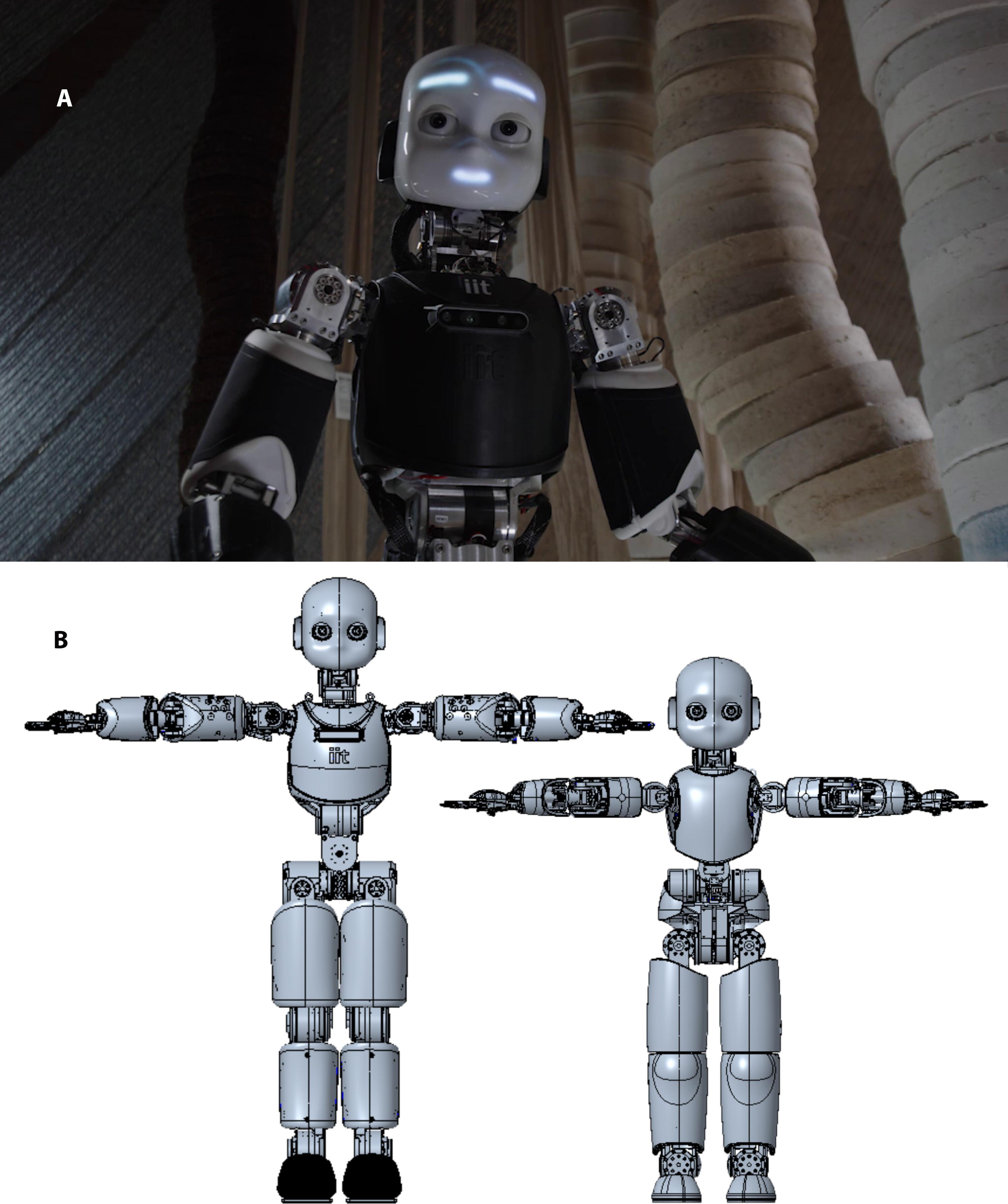
We present an avatar system designed to facilitate the embodiment of humanoid robots by human operators, validated through iCub3, a humanoid developed at the Istituto Italiano di Tecnologia. More precisely, the paper makes two contributions: First, we present the humanoid iCub3 as a robotic avatar that integrates the latest significant improvements after about 15 years of development of the iCub series. Second, we present a versatile avatar system enabling humans to embody humanoid robots encompassing aspects such as locomotion, manipulation, voice, and facial expressions with comprehensive sensory feedback including visual, auditory, haptic, weight, and touch modalities. We validated the system by implementing several avatar architecture instances, each tailored to specific requirements. First, we evaluated the optimized architecture for verbal, nonverbal, and physical interactions with a remote recipient. This testing involved the operator in Genoa and the avatar in the Biennale di Venezia, Venice—about 290 kilometers away—thus allowing the operator to visit the Italian art exhibition remotely. Second, we evaluated the optimized architecture for recipient physical collaboration and public engagement on stage, live, at the We Make Future show, a prominent world digital innovation festival. In this instance, the operator was situated in Genoa while the avatar operated in Rimini—about 300 kilometers away—interacting with a recipient who entrusted the avatar with a payload to carry on stage before an audience of approximately 2000 spectators. Third, we present the architecture implemented by the iCub Team for the All Nippon Airways (ANA) Avatar XPrize competition.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
